































Abderahman Rejeb a , Alireza Abdollahi b , Karim Rejeb c , Horst Treiblmaier d,
- a Jabatan Pengurusan dan Undang-undang, Fakulti Ekonomi, Universiti Rom Tor Vergata, Via Columbia, 2, Rom 00133, Itali
- b Jabatan Pentadbiran Perniagaan, Fakulti Pengurusan, Universiti Kharazmi, 1599964511 Tehran, Iran
- c Fakulti Sains Bizerte, Universiti Carthage, Zarzouna, 7021 Bizerte, Tunisia
- d Pusat Pengajian Pengurusan Antarabangsa, Universiti Modul Vienna, Am Kahlenberg 1, 1190 Vienna, Austria
| MAKLUMAT ARTIKEL | ABSTRAK |
| Kata kunci: Drone UAV Pertanian ketepatan Internet Perkara Bibliometrik | Dron, juga dikenali sebagai Kenderaan Udara Tanpa Pemandu (UAV), telah menyaksikan perkembangan yang luar biasa dalam beberapa dekad kebelakangan ini. Dalam bidang pertanian, mereka telah mengubah amalan pertanian dengan menawarkan penjimatan kos yang besar kepada petani, meningkat kecekapan operasi, dan keuntungan yang lebih baik. Sepanjang dekad yang lalu, topik dron pertanian telah menarik perhatian akademik yang luar biasa. Oleh itu, kami menjalankan semakan menyeluruh berdasarkan bibliometrik untuk meringkaskan dan menyusun kesusasteraan akademik sedia ada dan mendedahkan trend penyelidikan semasa dan titik panas. Kami mengaplikasikan teknik bibliometrik dan menganalisis kesusasteraan sekitar dron pertanian untuk meringkaskan dan menilai kajian terdahulu. Analisis kami menunjukkan bahawa penderiaan jauh, pertanian ketepatan, pembelajaran mendalam, pembelajaran mesin dan Internet Perkara adalah topik kritikal yang berkaitan dengan dron pertanian. Petikan bersama analisis mendedahkan enam kelompok penyelidikan yang luas dalam kesusasteraan. Kajian ini adalah salah satu percubaan pertama untuk meringkaskan penyelidikan dron dalam pertanian dan mencadangkan arah penyelidikan masa depan. |
Pengenalan
Pertanian mewakili sumber makanan utama dunia (Friha et al., 2021), dan ia telah menghadapi cabaran yang teruk disebabkan oleh
peningkatan permintaan untuk produk makanan, keselamatan makanan dan kebimbangan keselamatan serta seruan untuk perlindungan alam sekitar, pemeliharaan air, dan
kemampanan (Inoue, 2020). Perkembangan ini diramal berterusan memandangkan populasi dunia dianggarkan mencecah 9.7 bilion menjelang 2050
(2019). Memandangkan pertanian merupakan contoh penggunaan air yang paling menonjol di seluruh dunia, diharapkan permintaan makanan dan air
penggunaan akan meningkat secara mendadak pada masa hadapan. Tambahan pula, peningkatan penggunaan baja dan racun perosak
ditambah dengan kegigihan aktiviti pertanian boleh membawa kepada cabaran alam sekitar masa hadapan. Begitu juga, tanah pertanian adalah terhad, dan
bilangan petani semakin berkurangan di seluruh dunia. Cabaran ini menekankan keperluan untuk penyelesaian pertanian yang inovatif dan mampan (Elijah
et al., 2018; Friha et al., 2021; Inoue, 2020; Tzounis et al., 2017).
Menggabungkan teknologi baru telah dikenal pasti sebagai penyelesaian yang menjanjikan untuk menangani cabaran ini. Pertanian pintar (Brewster et al.,
2017; Tang et al., 2021) dan pertanian ketepatan (Feng et al., 2019; Khanna & Kaur, 2019) telah muncul akibat perdebatan sedemikian. The
dahulu adalah tanggapan umum untuk menerima pakai teknologi komunikasi maklumat (ICT) dan inovasi termaju lain dalam aktiviti pertanian untuk meningkatkan kecekapan dan keberkesanan (Haque et al., 2021). Yang terakhir memberi tumpuan kepada pengurusan khusus tapak di mana tanah dibahagikan kepada
bahagian homogen, dan setiap bahagian mendapat jumlah input pertanian yang tepat untuk pengoptimuman hasil tanaman melalui teknologi baru (Feng et al., 2019; Khanna & Kaur, 2019). Teknologi terkemuka yang telah menarik perhatian sarjana dalam bidang ini termasuk Wireless Sensor Networks (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), Internet of Things (IoT) (Gill et al., 2017; He et al., 2021;
teknik kecerdasan buatan (AI), termasuk pembelajaran mesin dan pembelajaran mendalam (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019), teknologi pengkomputeran (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), data besar (Gill et al., 2017; Tantalaki
et al., 2019), dan blockchain (PW Khan et al., 2020; Pincheira et al., 2021).
Sebagai tambahan kepada teknologi yang disebutkan di atas, penderiaan jauh telah dianggap sebagai alat teknologi yang berpotensi tinggi untuk meningkatkan
pertanian pintar dan jitu. Satelit, pesawat krew manusia dan dron ialah teknologi penderiaan jauh yang popular (Tsouros et al., 2019).
Dron, yang lebih dikenali sebagai Kenderaan Udara Tanpa Pemandu (UAV), Sistem Pesawat Tanpa Pemandu (UAS), dan pesawat pandu jarak jauh, adalah daripada
amat penting kerana ia mempunyai pelbagai kelebihan berbanding dengan teknologi penderiaan jauh yang lain. Sebagai contoh, dron boleh menghantar
imej berkualiti tinggi dan beresolusi tinggi pada hari mendung (Manfreda et al., 2018). Selain itu, ketersediaan dan kelajuan pemindahan mereka adalah yang lain
faedah (Radoglou-Grammatikis et al., 2020). Berbanding dengan pesawat, dron sangat menjimatkan kos dan mudah disediakan dan diselenggara (Tsouros et al., 2019). Walaupun pada mulanya digunakan terutamanya untuk tujuan ketenteraan, dron boleh memberi manfaat kepada banyak aplikasi awam, contohnya dalam pengurusan rantaian bekalan (A. Rejeb, Rejeb, et al., 2021a), untuk tujuan kemanusiaan (A. Rejeb, Rejeb, et al., 2021c), pertanian pintar, ukur dan pemetaan, dokumentasi warisan budaya, pengurusan bencana, dan pemuliharaan hutan dan hidupan liar (Panday, Pratihast, et al., 2020). Dalam pertanian, kawasan aplikasi pelbagai dron wujud kerana ia boleh disepadukan dengan teknologi baru, keupayaan pengkomputeran, dan penderia onboard untuk menyokong pengurusan tanaman (cth, pemetaan, pemantauan, pengairan, diagnosis tumbuhan) (H. Huang et al., 2021) , pengurangan bencana, sistem amaran awal, pemuliharaan hidupan liar dan perhutanan untuk menamakan beberapa (Negash et al., 2019). Begitu juga, dron boleh dimanfaatkan dalam beberapa aktiviti pertanian, termasuk pemantauan tanaman dan pertumbuhan, anggaran hasil, penilaian tekanan air, dan pengesanan rumpai, perosak dan penyakit (Inoue, 2020; Panday, Pratihast, et al., 2020). Dron bukan sahaja boleh digunakan untuk tujuan pemantauan, anggaran dan pengesanan berdasarkan data deria mereka, tetapi juga untuk pengairan ketepatan dan pengurusan rumpai tepat, perosak dan penyakit. Dengan kata lain, dron mampu menyembur air dan racun perosak dalam jumlah yang tepat berdasarkan data alam sekitar. Faedah dron dalam pertanian diringkaskan dalam Jadual 1.
Faedah utama dron dalam pertanian.
| Manfaat | Rujukan |
| Meningkatkan temporal dan spatial resolusi penderiaan | (Gago et al., 2015; Niu et al., 2020; Srivastava et al., 2020) |
| Memudahkan pertanian ketepatan | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaitijiang et al., 2017) |
| Pengelasan dan pengakap bagi tanaman | (Inoue, 2020; Kalischuk et al., 2019; Lopez-´ Granados et al., 2016; Maimaitijiang et al., 2017; Melville et al., 2019; Moharana & Dutta, 2016) |
| Penggunaan baja | (L. Deng et al., 2018; Guan et al., 2019) |
| Pemantauan kemarau | (Fawcett et al., 2020; Panday, Pratihast, et al., 2020; Su et al., 2018) |
| Anggaran biojisim | (Bendig et al., 2014) |
| Anggaran hasil | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao et al., 2020) |
| Pengurangan bencana | (Negash et al., 2019) |
| Pemuliharaan hidupan liar dan perhutanan | (Negash et al., 2019; Panday, Pratihast, et al., 2020) |
| Penilaian tekanan air | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. Zhang et al., 2019) |
| Perosak, rumpai, dan penyakit pengesanan | (Gaˇ sparovi´c et al., 2020; Inoue, 2020; J. Su, Liu, et al., 2018; X. Zhang et al., 2019) |
Sebaliknya, dron menghadapi batasan juga. Penglibatan juruterbang, kuasa enjin, kestabilan dan kebolehpercayaan, kualiti penderia akibat muatan
had berat, kos pelaksanaan, dan peraturan penerbangan, adalah antaranya (C. Zhang & Kovacs, 2012). Kami membandingkan kekurangan
daripada tiga teknologi penderiaan jauh mudah alih dalam Jadual 2. Teknologi penderiaan jauh lain, seperti penderia tanah, berada di luar fokus kajian ini.
Kekurangan pelbagai teknologi penderiaan jauh mudah alih.
| Penginderaan jauh teknologi | Kekurangan | Rujukan |
| Drone (UAV) | Penglibatan juruterbang; imej' kualiti (purata); kos pelaksanaan (purata); kestabilan, kebolehgerakan, dan kebolehpercayaan; penyeragaman; kuasa enjin; kuasa terhad sumber (ketahanan bateri); tempoh penerbangan terhad, perlanggaran dan serangan siber; terhad berat muatan; set data yang besar dan pemprosesan data yang terhad kemampuan; kekurangan peraturan; kurang kepakaran, kemasukan tinggi halangan kepada akses kepada dron pertanian; | (Bacco et al., 2018; Dawaliby et al., 2020; Hardin & Hardin, 2010; Hardin & Jensen, 2011; Lagkas et al., 2018; Laliberte et al., 2007; Laliberte & Rango, 2011; Manfreda et al., 2018, 2018; Nebiker et al., 2008; Puri et al., 2017; Velusamy et al., 2022; C. Zhang & Kovacs, 2012) |
| satelit | Liputan satelit berkala, resolusi spektrum terhad; terdedah kepada masalah penglihatan (cth, awan); Tidak tersedia dan kelajuan pemindahan rendah; orientasi dan vignetting mempengaruhi data spatial yang mahal koleksi; penghantaran data yang lambat masa untuk pengguna akhir | (Aboutalebi et al., 2019; Cen et al., 2019; Chen et al., 2019; Nansen & Elliott, 2016; Panday, Pratihast, et al., 2020; Sai Vineeth et al., 2019) |
| Pesawat | Kos pakai yang tinggi; persediaan yang rumit; kos penyelenggaraan; ketiadaan yang boleh dipercayai kapal terbang, geometri imej; data tidak biasa pemerolehan; kekurangan fleksibiliti; kemalangan maut; data sensor variasi akibat getaran; isu georeferencing | (Armstrong et al., 2011; Atkinson et al., 2018; Barbedo & Koenigkan, 2018; Kovalev & Voroshilova, 2020; Suomalainen et al., 2013; Thamm et al., 2013) |
Sebagai teknologi pelbagai disiplin dan pelbagai guna dalam pertanian, dron telah disiasat dari pelbagai perspektif. Sebagai contoh, sarjana telah mengkaji aplikasi dron dalam pertanian (Kulbacki et al., 2018; Mogili & Deepak, 2018), sumbangan mereka kepada pertanian ketepatan (Puri et al., 2017; Tsouros et al., 2019), pelengkapnya dengan yang lain. teknologi canggih (Al-Thani et al., 2020; Dutta & Mitra, 2021; Nayyar et al., 2020; Saha et al., 2018), dan kemungkinan memajukan keupayaan navigasi dan penderiaan mereka (Bareth et al. , 2015; Suomalainen et al., 2014). Memandangkan penyelidikan mengenai aplikasi dron dalam pertanian telah menjadi berleluasa (Khan et al., 2021)), terdapat keperluan untuk meringkaskan kesusasteraan yang masih ada dan mendedahkan struktur intelektual domain. Tambahan pula, sebagai bidang berteknologi tinggi dengan penambahbaikan berterusan, semakan berstruktur perlu dijalankan untuk meringkaskan secara berkala literatur yang ada dan mengenal pasti jurang penyelidikan yang penting. Kepada
tarikh, terdapat beberapa ulasan yang membincangkan aplikasi dron dalam sektor pertanian. Sebagai contoh, Mogili dan Deepak (2018) mengkaji secara ringkas implikasi dron untuk pemantauan tanaman dan penyemburan racun perosak. Inoue (2020) menjalankan kajian semula penggunaan satelit dan dron dalam penderiaan jauh dalam pertanian. Penulis meneroka cabaran teknologi untuk mengguna pakai pertanian pintar dan sumbangan satelit dan dron berdasarkan kajian kes dan amalan terbaik. Tsouros et al. (2019) meringkaskan pelbagai jenis dron dan aplikasi utamanya dalam pertanian, menonjolkan pelbagai kaedah pemerolehan dan pemprosesan data. Baru-baru ini, Aslan et al. (2022) menjalankan semakan menyeluruh terhadap aplikasi UAV dalam aktiviti pertanian dan menekankan perkaitan penyetempatan dan pemetaan serentak untuk UAV di rumah hijau. Diaz-Gonzalez et al. (2022) menyemak kajian terbaru tentang pengeluaran hasil tanaman berdasarkan teknik pembelajaran mesin dan jarak jauh yang berbeza
sistem penderiaan. Penemuan mereka menunjukkan bahawa UAV berguna untuk menganggar penunjuk tanah dan mengatasi sistem satelit dari segi resolusi spatial, temporaliti maklumat dan fleksibiliti. Basiri et al. (2022) membuat tinjauan menyeluruh tentang pelbagai pendekatan dan kaedah untuk mengatasi cabaran perancangan laluan untuk UAV berbilang pemutar dalam konteks pertanian ketepatan. Selain itu, Awais et al. (2022) meringkaskan aplikasi data penderiaan jauh UAV dalam tanaman untuk menganggarkan status air dan menyediakan sintesis mendalam tentang kapasiti prospektif penderiaan jauh UAV untuk aplikasi tekanan pembazir. Akhirnya, Aquilani et al. (2022) menyemak teknologi penternakan prevision yang digunakan dalam sistem ternakan berasaskan pastura dan menyimpulkan bahawa penderiaan jauh yang didayakan oleh UAV adalah berfaedah untuk penilaian biojisim dan pengurusan kumpulan.
Juga, usaha untuk menggunakan UAV dalam pemantauan, pengesanan, dan pengumpulan ternakan telah dilaporkan baru-baru ini.
Walaupun ulasan ini menghasilkan cerapan baharu dan penting, tiada ulasan komprehensif dan terkini berdasarkan bibliometrik boleh ditemui dalam literatur, yang memberikan jurang pengetahuan yang jelas. Selain itu, telah dinyatakan bahawa apabila pengeluaran ilmiah berkembang dalam domain saintifik, ia menjadi penting bagi penyelidik untuk menggunakan pendekatan kajian kuantitatif untuk memahami struktur pengetahuan domain (Rivera & Pizam, 2015). Begitu juga, Ferreira et al. (2014) berhujah bahawa apabila bidang penyelidikan matang dan menjadi rumit, para sarjana harus bertujuan untuk sekali-sekala memahami pengetahuan yang dihasilkan dan dikumpulkan untuk mendedahkan sumbangan baru, menangkap tradisi dan trend penyelidikan, mengenal pasti topik yang dipelajari, dan menyelidiki struktur pengetahuan bidang dan hala tuju penyelidikan yang berpotensi. Walaupun Raparelli dan Bajocco (2019) menjalankan analisis bibliometrik untuk mengkaji domain pengetahuan aplikasi dron dalam pertanian dan perhutanan, kajian mereka hanya mempertimbangkan penyelidikan ilmiah yang diterbitkan antara 1995 dan 2017, yang tidak mencerminkan dinamik kawasan yang bergerak pantas ini. Selanjutnya, pengarang tidak cuba untuk mengenal pasti sumbangan yang paling berpengaruh dalam bidang, mengelompokkan kesusasteraan, dan menilai struktur intelektual menggunakan analisis petikan bersama. Akibatnya, adalah perlu untuk meringkaskan literatur untuk mendedahkan fokus penyelidikan semasa, arah aliran dan titik liputan.
Untuk mengisi jurang pengetahuan ini, kami memanfaatkan metodologi kuantitatif dan kaedah bibliometrik yang ketat untuk mengkaji keadaan semasa penyelidikan di persimpangan dron dan pertanian. Kami berpendapat bahawa kajian semasa memberi beberapa sumbangan kepada literatur sedia ada dengan mengkaji teknologi baru muncul yang sangat diperlukan dalam pertanian kerana ia memberikan potensi yang besar untuk mengubah beberapa aspek dalam sektor ini. Keperluan untuk analisis bibliometrik dron pertanian lebih dirasakan memandangkan pengetahuan dron yang bertaburan dan berpecah-belah dalam konteks pertanian. Begitu juga, kesusasteraan yang berkaitan dengan dron pertanian perlu dikelompokkan secara sistematik, dengan mengambil kira kajian paling berpengaruh yang membina asas bidang penyelidikan ini. Merit dalam analisis juga termasuk penjelasan tema penyelidikan utama yang diwakili dalam literatur. Memandangkan potensi transformasi teknologi, kami berpendapat bahawa analisis rangkaian yang mendalam menghasilkan pandangan baru dengan menentukan karya berpengaruh dan mendedahkan tema mengenai potensi dron untuk pertanian.
Oleh itu, kami berusaha untuk mencapai objektif penyelidikan berikut:
- Pengenalpastian penerbitan berpengaruh dengan sumbangan cemerlang kepada aplikasi dron dalam bidang pertanian.
- Pengelompokan literatur, pengenalpastian fokus penyelidikan, dan pemetaan kajian 'struktur intelek' utama berdasarkan persamaan semantik dengan menggunakan analisis petikan bersama.
- Pemahaman tentang evolusi perkaitan dan rangkaian petikan dari semasa ke semasa di kalangan pelbagai penerbitan dalam bidang dan pengenalpastian hala tuju penyelidikan masa depan dan topik hangat.
Selebihnya kertas kerja disusun seperti berikut: bahagian 2 menggariskan metodologi dan langkah pengumpulan data; bahagian 3 menyediakan keputusan analisis; dan bahagian 4 membincangkan penemuan dan menyimpulkan dengan sumbangan penyelidikan, implikasi dan hala tuju masa hadapan.
Metodologi
Dalam kajian penyelidikan semasa ini, kami menjalankan analisis bibliometrik untuk meneroka aplikasi dron dalam pertanian. Pendekatan kuantitatif ini mendedahkan struktur intelektual domain pengetahuan (Arora & Chakraborty, 2021) dan status semasa, topik hangat, dan hala tuju penyelidikan masa depan yang boleh disiasat dengan menggunakan kaedah ini (Kapoor et al., 2018; Mishra et al. , 2017; A. Rejeb, Rejeb, et al., 2021b; Secara amnya, analisis bibliometrik meneliti literatur yang ada untuk meringkaskan dan mendedahkan corak tersembunyi komunikasi bertulis dan evolusi disiplin berdasarkan statistik dan kaedah matematik, dan ia digunakan untuk set data yang besar (Pritchard, 2021; Small, 2020; Tahai & Rigsby). , 1969). Dengan menggunakan bibliometrik, kami bercita-cita untuk lebih memahami paradigma sedia ada dan fokus penyelidikan yang menyumbang kepada domain berdasarkan persamaan (Thelwall, 1999). Bibliometrik memberikan pandangan baharu yang disokong oleh kekuatan kuantitatif objektif metodologi (Casillas & Acedo, 1998). Ramai sarjana sebelum ini telah menjalankan kajian bibliometrik dalam domain berkaitan, termasuk pertanian, penderiaan jauh dan transformasi digital (Armenta-Medina et al., 2008; Bouzembrak et al., 2007; A. Rejeb, Treiblmaier, et al., 2020; Wamba & Queiroz, 2019; Wang et al., 2021).
Analisis petikan
Analisis petikan mendedahkan pelbagai pandangan tentang bidang penyelidikan tertentu. Pertama sekali, ia membantu untuk mendedahkan pengarang dan penerbitan yang paling berpengaruh yang menyumbang kepada bidang penyelidikan tertentu dan memberi impak yang ketara (Gundolf & Filser, 2013). Kedua, aliran pengetahuan dan hubungan komunikasi antara pengarang boleh didedahkan. Akhir sekali, dengan mengesan pautan antara karya yang dipetik dan memetik, seseorang boleh meneroka perubahan dan evolusi domain pengetahuan dari semasa ke semasa (Pournader
et al., 2020). Nombor petikan yang tinggi bagi sesebuah penerbitan mencerminkan kaitannya dan sumbangan yang besar kepada domain penyelidikan (Baldi, 1998; Gundolf & Filser, 2013; Marinko, 1998). Analisis petikan penerbitan juga membantu mengenal pasti karya yang berkaitan dan menjejaki populariti serta kemajuannya dari semasa ke semasa.
Dokumen analisis petikan bersama
Analisis kutipan bersama adalah kaedah yang berharga untuk meneroka hubungan antara penerbitan dan menggambarkan struktur intelektual sesuatu bidang (Nerur et al., 2008). Dalam erti kata lain, dengan mengenal pasti penerbitan yang paling banyak disebut dan kaitannya, kaedah mengumpulkan penerbitan ke dalam kelompok penyelidikan yang berbeza di mana penerbitan dalam kelompok kerap berkongsi idea yang serupa (McCain, 1990; Small, 1973). Adalah penting untuk menyebut bahawa persamaan tidak bermakna bahawa penemuan penerbitan adalah
bersatu padu dan bersetuju antara satu sama lain; penerbitan tergolong dalam kelompok yang sama kerana persamaan topik, tetapi ia boleh mempunyai sudut pandangan yang bercanggah.
Pengumpulan dan analisis data
Mengikuti metodologi yang dicadangkan oleh White dan Griffith (1981), kami melakukan carian komprehensif artikel jurnal untuk merangkumi keseluruhan domain penyelidikan aplikasi dron dalam pertanian, mengikuti lima langkah berikut:
- Langkah pertama ialah pengumpulan data. Scopus telah dipilih sebagai salah satu pangkalan data yang paling komprehensif dan boleh dipercayai dengan keputusan yang standard. Meta-data penerbitan yang berkaitan dengan semua aplikasi dron dalam pertanian telah diambil. Kemudian kami menganalisis artikel yang dipilih, mengalih keluar artikel di luar topik daripada analisis.
- Kami menganalisis literatur dan mengenal pasti kata kunci paling penting yang digunakan dalam bidang penyelidikan.
- Menggunakan analisis petikan, kami meneroka hubungan antara pengarang dan dokumen untuk mendedahkan corak petikan asas. Kami juga mengenal pasti pengarang dan penerbitan yang paling berpengaruh dengan sumbangan penting kepada bidang dron pertanian.
- Kami menjalankan analisis petikan bersama untuk mengumpulkan penerbitan yang serupa ke dalam kelompok.
- Akhir sekali, kami menganalisis hubungan dan kaitan antara negara, institusi dan jurnal untuk menggambarkan rangkaian kerjasama.
Pengenalpastian istilah carian yang sesuai
Kami menggunakan rentetan carian berikut untuk pengagregatan data: (dron* ATAU “kenderaan udara tanpa pemandu” ATAU uav* ATAU “sistem pesawat tanpa pemandu” ATAU uas ATAU “pesawat yang dipandu jauh”) DAN (pertanian ATAU pertanian ATAU pertanian ATAU petani). Pencarian dilakukan pada September 2021. Drone mempunyai beberapa sebutan, termasuk UAV, UAS, dan pesawat pandu jarak jauh (Sah et al., 2021). Istilah carian khusus berkaitan pertanian dikenal pasti berdasarkan kajian Abdollahi et al. (2021). Demi kejelasan dan ketelusan, pertanyaan tepat yang kami gunakan diberikan dalam Lampiran 1. Berikutan proses pembersihan data, kami mencipta fail teks yang kemudiannya dimuatkan ke dalam BibExcel, alat biasa untuk analisis petikan dan petikan bersama. Alat ini juga menawarkan interaksi mudah dengan perisian lain dan menawarkan tahap kebebasan yang ketara dalam pengendalian dan analisis data. VOSviewer versi 1.6.16 digunakan untuk menggambarkan penemuan dan menjana rangkaian bibliometrik (Eck & Waltman, 2009). VOSviewer menawarkan pelbagai visualisasi intuitif, terutamanya untuk menganalisis peta bibliometrik (Geng et al., 2020). Tambahan pula, ia membantu dalam menyediakan hasil visual yang jelas yang membantu dalam memahami keputusan dengan lebih baik (Abdollahi et al., 2021). Menggunakan rentetan carian seperti yang dinyatakan di atas, kami mengumpulkan dan menyimpan semua penerbitan yang berkaitan. Hasil carian pertama menghasilkan sejumlah 5,085 dokumen. Untuk memastikan kualiti sampel yang dipilih, hanya artikel jurnal yang disemak rakan sebaya sahaja yang dipertimbangkan dalam penyelidikan, mengakibatkan pengecualian jenis dokumen lain, seperti buku, bab, prosiding persidangan dan nota editorial. Semasa proses penyaringan, penerbitan yang tidak relevan (iaitu, di luar skop kerja ini), berlebihan (iaitu, pendua yang berasal daripada pengindeksan berganda), dan bukan berbahasa Inggeris telah ditapis keluar. Proses ini menghasilkan kemasukan 4,700 dokumen dalam analisis akhir.
Dapatan dan perbincangan
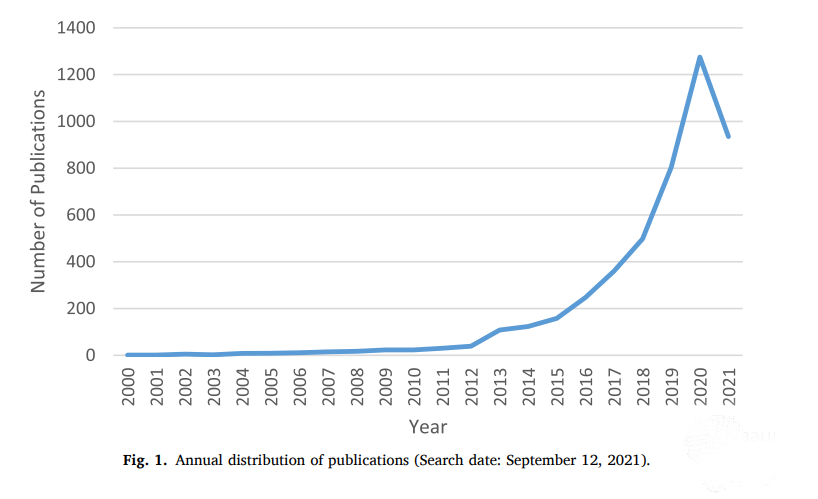
Sebagai permulaan, kami menganalisis perkembangan dalam pengeluaran penerbitan dalam kesusasteraan semasa mengenai dron pertanian. Taburan temporal penyelidikan ilmiah ditunjukkan dalam Rajah 1. Kami melihat peningkatan pesat dalam penerbitan dari tahun 2011 (30 penerbitan) dan seterusnya; oleh itu, kami memutuskan untuk membahagikan tempoh analisis kepada dua peringkat berbeza. Kami merujuk kepada tempoh antara 1990 dan 2010 sebagai peringkat pembinaan, yang mempunyai kira-kira tujuh kertas kerja diterbitkan setiap tahun. Tempoh selepas 2010 telah dipanggil peringkat pertumbuhan kerana penyelidikan mengenai aplikasi dron dalam pertanian menyaksikan lonjakan eksponen dalam tempoh ini. Selepas 2010, peningkatan jumlah penerbitan mengesahkan minat yang semakin meningkat dalam kalangan penyelidik, yang juga mencerminkan bahawa dron telah digunakan untuk penderiaan jauh dan digunakan dalam pertanian ketepatan (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020 ). Khususnya, bilangan penerbitan meningkat daripada 108 pada 2013 kepada 498 pada 2018 dan memuncak pada 1,275 pada 2020. Sebanyak 935 artikel telah diterbitkan antara Januari dan pertengahan September 2021. Selepas itu, kami memilih untuk memfokuskan analisis kami lebih pada peringkat pertumbuhan kerana tempoh ini mencerminkan kehalusan drone pertanian yang paling terkini dan penting.
Analisis kata kunci
Kata kunci yang dipilih oleh pengarang untuk penerbitan mempunyai kesan penting pada cara kertas itu diwakili dan cara ia disampaikan dalam komuniti saintifik. Mereka mengenal pasti subjek utama penyelidikan dan menentukan potensinya untuk berkembang atau gagal (Day & Gastel, 1998.; Kim et al., 2016; Uddin et al., 2015). Analisis kata kunci, alat untuk mendedahkan arah aliran dan arah penyelidikan yang lebih luas, merujuk kepada kompilasi kata kunci semua penerbitan berkaitan dalam domain (Dixit & Jakhar, 2021). Dalam kajian semasa, kami membahagikan kata kunci teragregat kepada dua set (iaitu, sehingga 2010 dan 2011–2021) untuk meneroka topik yang paling popular. Dengan melakukan ini, kami boleh mengesan kata kunci penting dalam kedua-dua set dan memastikan kami menangkap semua data yang diperlukan. Bagi setiap set, sepuluh kata kunci teratas dibentangkan dalam Jadual 3. Kami menghapuskan ketidakkonsistenan dengan menggabungkan kata kunci semantik yang serupa, seperti "drone" dan "drone" atau, sama seperti, "Internet of Things" dan "IoT.".
Jadual 3 menunjukkan bahawa "kenderaan udara tanpa pemandu" ialah kata kunci yang lebih kerap digunakan berbanding dengan "dron" dan "sistem udara tanpa pemandu" dalam kedua-dua tempoh masa. Selain itu, "penderiaan jauh," "pertanian ketepatan" dan "pertanian" mempunyai kedudukan tinggi dalam kedua-dua tempoh. Dalam tempoh pertama, "pertanian ketepatan" menduduki tempat kelima, dan ia menduduki tempat kedua dalam tempoh kedua, yang menggambarkan bagaimana dron menjadi semakin penting dalam mencapai pertanian ketepatan kerana mereka boleh membuat pemantauan,
amalan pengesanan dan anggaran lebih pantas, lebih murah dan lebih mudah untuk dilaksanakan berbanding dengan sistem penderiaan jauh dan berasaskan tanah yang lain. Selain itu, mereka boleh menyembur jumlah input yang tepat (cth, air atau racun perosak) apabila diperlukan (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020).
Senarai kata kunci yang paling kerap digunakan.
Kedudukan | 1990-2010 | No. kejadian | 2011-2021 | No. kejadian |
| 1 | udara tanpa pemandu kenderaan | 28 | tanpa pemandu kenderaan udara | 1628 |
| 2 | penginderaan jauh | 7 | ketepatan pertanian | 489 |
| 3 | pertanian | 4 | penginderaan jauh | 399 |
| 4 | udara | 4 | berdengung | 374 |
| 5 | ketepatan pertanian | 4 | tanpa pemandu sistem udara | 271 |
| 6 | udara tanpa pemandu | 4 | pertanian | 177 |
| 7 | hiperspektral sensor | 3 | pembelajaran mendalam | 151 |
| 8 | saraf tiruan rangkaian | 2 | mesin pembelajaran | 149 |
| 9 | penerbangan autonomi | 2 | tumbuh-tumbuhan indeks | 142 |
| 10 | kopi | 2 | Internet daripada Perkara | 124 |
Satu lagi ciri menarik ialah kehadiran teknologi pelengkap. Pada peringkat pertama, "Penderia Hiperspektral" dan "rangkaian neural buatan" (ANN) adalah antara sepuluh kata kunci teratas. Pengimejan hiperspektral merevolusikan pengimejan tradisional dengan mengumpul sejumlah besar imej pada pelbagai panjang gelombang. Dengan berbuat demikian, penderia secara serentak boleh mengumpul maklumat spatial dan spektrum yang lebih baik berbanding dengan pengimejan berbilang spektrum, spektroskopi dan imejan RGB (Adao ˜ et al.,
2017). Kejadian "ANN" pada peringkat pertama dan "pembelajaran mendalam" (DL) dan "pembelajaran mesin" (ML) pada peringkat kedua membayangkan bahawa kebanyakan karya yang diterbitkan memberi tumpuan kepada pemeriksaan potensi teknik AI untuk dron- pertanian berasaskan. Walaupun dron mampu terbang secara autonomi, ia masih memerlukan penglibatan juruterbang, yang membayangkan tahap kecerdasan peranti yang rendah. Walau bagaimanapun, masalah ini boleh diselesaikan kerana kemajuan teknik AI, yang boleh memberikan kesedaran situasi yang lebih baik dan sokongan keputusan autonomi. Dilengkapi dengan AI, dron boleh mengelakkan perlanggaran semasa navigasi, menambah baik pengurusan tanah dan tanaman (Inoue, 2020), dan mengurangkan buruh dan tekanan untuk manusia (BK Sharma et al., 2019).
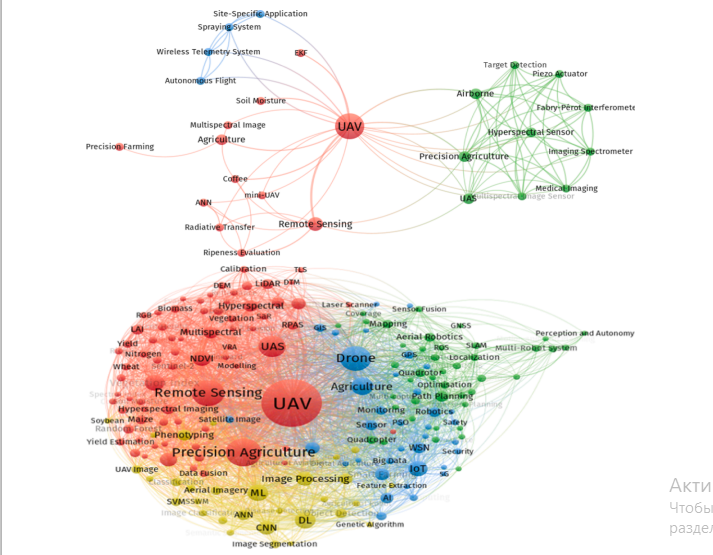
Disebabkan fleksibiliti dan keupayaan mereka untuk mengendalikan sejumlah besar data tak linear, teknik AI adalah kaedah yang sesuai untuk menganalisis data yang dihantar oleh dron dan sistem penderiaan jauh dan berasaskan darat lain untuk ramalan dan membuat keputusan (Ali et al., 2015; Inoue, 2020). Tambahan pula, kehadiran "IoT" dalam tempoh kedua menunjukkan peranannya yang muncul dalam pertanian. IoT sedang merevolusikan pertanian dengan menghubungkan teknologi lain, termasuk dron, ML, DL, WSN dan data besar. Salah satu faedah utama pelaksanaan IoT ialah keupayaannya untuk menggabungkan pelbagai tugas dengan cekap dan berkesan (pemerolehan data, analisis dan pemprosesan data, membuat keputusan dan pelaksanaan) dalam hampir masa nyata (Elijah et al., 2018; Feng et al. , 2019; Muangprathub et al., 2019). Tambahan pula, dron dianggap sebagai alat yang cekap untuk menangkap data yang diperlukan untuk mengira kekuatan tumbuh-tumbuhan dan sifat tumbuh-tumbuhan (Candiago et al., 2015). Rajah 2a dan 2b menggambarkan rangkaian kejadian bersama kata kunci untuk kedua-dua tempoh masa.
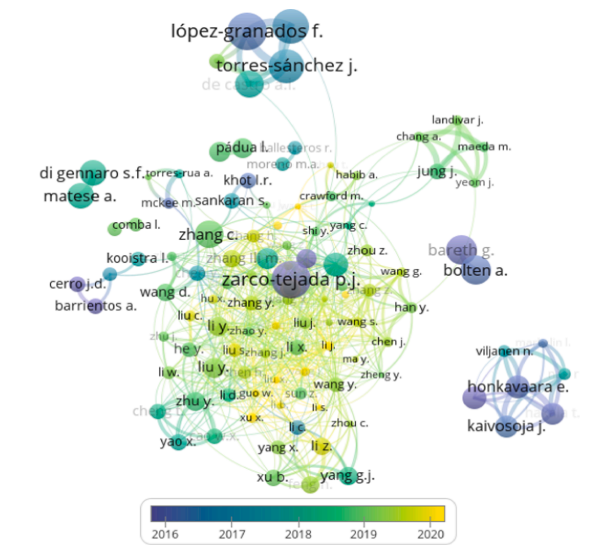
Pengarang yang berpengaruh
Dalam bahagian ini, kami menentukan pengarang yang berpengaruh dan meneliti cara rangkaian petikan pengarang boleh menggambarkan dan menyusun kesusasteraan semasa. Rajah 3 menunjukkan tindanan kronologi semua penyelidik dengan bilangan petikan tertinggi. Skala warna mencerminkan variasi mengikut tahun petikan pengarang. Kami meneliti struktur petikan penyelidik yang menerbitkan kajian tentang dron pertanian dengan menggunakan ambang minimum 50 petikan dan sepuluh penerbitan. Daripada
12,891 penulis, hanya 115 yang memenuhi syarat ini. Jadual 4 menyenaraikan sepuluh pengarang berpengaruh teratas, diisih mengikut bilangan maksimum petikan. Lopez- Granados F. mendahului senarai dengan 1,963 petikan, diikuti oleh Zarco-Tejada PJ dengan 1,909 petikan.
Senarai pengarang yang paling banyak dipetik.
| Kedudukan | Pengarang | Petikan |
| 1 | Lopez-Granados ´ F. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | Pena ˜ JM | 1,644 |
| 4 | Torres-S´ anchez J. | 1,576 |
| 5 | Fereres E | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | Bolten A | 1,160 |
| 8 | Bareth G | 1,155 |
| 9 | Berni JA | 1,132 |
| 10 | de Castro AI | 1,036 |
Apabila ia datang kepada penerbitan individu, artikel Zhang dan Kovacs (2012) telah menjadi kajian yang paling banyak dipetik diterbitkan dalam Precision Agriculture. Di sini, penulis menyemak aplikasi UAS dalam pertanian ketepatan. Penemuan penyelidikan mereka mencadangkan bahawa terdapat keperluan untuk memajukan reka bentuk platform, pengeluaran, penyeragaman rujukan geo imej, dan aliran kerja mendapatkan maklumat untuk menyediakan petani dengan produk akhir yang boleh dipercayai. Selain itu, mereka mengesyorkan untuk melibatkan petani dengan lebih kuat, terutamanya dalam perancangan lapangan, tangkapan imej, serta tafsiran dan analisis data. Apa yang penting, kajian ini adalah antara yang pertama menunjukkan kepentingan UAV dalam pemetaan lapangan, pemetaan vigor, pengukuran kandungan kimia, pemantauan tegasan tumbuh-tumbuhan, dan penilaian kesan baja terhadap pertumbuhan tumbuhan. Cabaran yang berkaitan dengan teknologi juga termasuk kos yang tinggi, keupayaan sensor, kestabilan dan kebolehpercayaan platform, kekurangan penyeragaman dan prosedur yang konsisten untuk menganalisis sejumlah besar data.
Analisis petikan
Analisis petikan mewakili kajian pengaruh artikel, walaupun terdedah kepada aliran (cth, bias petikan, petikan sendiri) dianggap sebagai salah satu instrumen standard untuk penilaian impak (Osareh, 1996; A. Rejeb et al., 2022; Sarli et al., 2010). Petikan juga mencerminkan kepentingan dan daya hidup sumbangan kertas kerja kepada kesusasteraan mengenai topik tertentu (R. Sharma et al., 2022). Kami menjalankan analisis petikan untuk menentukan kajian paling berpengaruh tentang dron pertanian dan meringkaskan kandungannya. Jadual 5 membentangkan senarai lima belas kertas kerja paling berpengaruh untuk tempoh 1990–2010 dan 2011–2021. Artikel oleh Berni et al. (2009)b dan Austin (2010) telah disebut paling banyak pada tahun 1990 dan 2010, masing-masing dengan 831 dan 498 petikan. Berni et al. (2009)b menggambarkan potensi untuk membangunkan produk penderiaan jauh kuantitatif melalui UAV berasaskan helikopter yang dilengkapi dengan penderia pengimejan berbilang spektrum terma dan jalur sempit yang berpatutan. Berbanding dengan penderia bawaan udara berawak tradisional, sistem UAV kos rendah untuk pertanian mampu mencapai anggaran setanding parameter biofizikal tanaman, jika tidak lebih baik. Kos yang berpatutan dan fleksibiliti operasi, di samping resolusi spektrum tinggi, spatial dan temporal yang tersedia pada masa pemulihan yang cepat, menjadikan UAV sesuai untuk pelbagai aplikasi yang memerlukan pengurusan kritikal masa, termasuk penjadualan pengairan dan pertanian ketepatan. Kertas daripada Berni et al. (2009)b sangat dipetik kerana ia secara berkesan menyepadukan platform sayap berputar tanpa pemandu dan penderia digital dan haba dengan mekanisme penentukuran yang diperlukan untuk aplikasi pertanian. Penerbitan kedua yang paling banyak disebut ialah buku yang dikarang oleh Austin (2010), yang membincangkan UAV dari perspektif reka bentuk, pembangunan dan penggunaan. Dalam bidang pertanian, UAV menyokong pemantauan tanaman dengan mengesan penyakit awal melalui perubahan warna tanaman, memudahkan penyemaian dan penyemburan tanaman, serta memantau dan memandu kumpulan.
Kajian Sullivan et al. (2007), Lumme et al. (2008), dan Gokto ¨ ǧan et al. (2010) menyelesaikan senarai lima belas artikel teratas yang paling banyak disebut. Artikel ini menggambarkan pembangunan sistem berasaskan UAV untuk menyokong pertanian. Mereka menawarkan penyelesaian kepada pelbagai masalah, seperti pemantauan dan pengimbasan tanaman, pengawasan dan pengurusan rumpai, dan sokongan keputusan. Mereka juga mencadangkan dan membincangkan keupayaan UAV untuk meningkatkan kecekapan pensampelan dan membantu petani dalam merangka yang tepat dan berkesan.
strategi penanaman. Dua kertas kerja telah dikarang oleh Berni (Berni et al., 2009b; Berni et al., 2009a), menggariskan kesan pentingnya terhadap penyelidikan berkaitan drone pertanian. Kertas daripada Zarco-Tejada et al. (2014) telah menjadi antara kajian perintis untuk menggambarkan keperluan untuk menggunakan imejan UAV kos rendah dalam kuantiti ketinggian pokok.
Senarai penerbitan yang paling banyak dipetik.
| Kedudukan | Dari 1990 untuk 2010 | Dari 2011 untuk 2021 | ||
| Dokumen | Nama | Dokumen | Nama | |
| 1 | (Berni et al., 2009b) | 831 | (C. Zhang & Kovacs, 2012) | 967 |
| 2 | (Austin, 2010) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (Hunt et al., 2010) | 331 | (Floreano & Wood, 2015) | 552 |
| 4 | (SR Herwitz et al., 2004) | 285 | (Hossein Motlagh et al., 2016) | 391 |
| 5 | (CCD Lelong et al., 2008) | 272 | (Shakhatreh et al., 2019) | 383 |
| 6 | (Berni et al., 2009b) | 250 | (Ma et al., 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al., 2008) | 198 | (Bendig et al., 2014) | 360 |
| 8 | (Hrabar et al., 2005) | 175 | (Zarco-Tejada et al., 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (Ad˜ ao et al., 2017) | 335 |
| 10 | (Schmale III et al., 2008) | 119 | (Honkavaara et al., 2013a) | 331 |
| 11 | (Abd-Elrahman et al., 2005) | 79 | (Candiago et al., 2015) | 327 |
| 12 | (Techy et al., 2010) | 69 | (Xiang & Tian, 2011) | 307 |
| 13 | (Sullivan et al., 2007) | 51 | (Matese et al., 2015) | 303 |
| 14 | (Lumme et al., 2008) | 42 | (Gago et al., 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al., 2010) | 40 | (Aasen et al., 2015a) | 269 |
Dalam tempoh kedua (2011–2021), penyelidikan oleh Zhang dan Kovacs (2012) dan Nex dan Remondino (2014) menghasilkan penerbitan yang paling kerap disebut. Zhang dan Kovacs (2012) berpendapat bahawa pertanian ketepatan boleh mendapat manfaat daripada melaksanakan teknik dan penderia geospatial, seperti sistem maklumat geografi, GPS, dan penderiaan jauh, untuk menangkap variasi dalam lapangan dan mengendalikannya dengan menggunakan strategi alternatif. Sebagai penukar permainan dalam pertanian ketepatan, penggunaan dron telah menandakan zaman baharu dalam penderiaan jauh, memudahkan pemerhatian udara, menangkap data pertumbuhan tanaman, keadaan tanah dan kawasan penyemburan. Kajian semula Zhang dan Kovacs (2012) adalah penting kerana ia menawarkan pandangan tentang UAV dengan mendedahkan kegunaan dan cabaran sedia ada peranti ini dalam pemantauan alam sekitar dan pertanian ketepatan, seperti had platform dan kamera, cabaran pemprosesan data, penglibatan petani dan peraturan penerbangan . Yang kedua
kajian yang paling banyak dipetik daripada Nex dan Remondino (2014) menyemak keadaan seni UAV untuk menangkap, memproses dan menganalisis imej bumi.
Kerja mereka juga membentangkan gambaran keseluruhan beberapa platform UAV, aplikasi dan kes penggunaan, mempamerkan kemajuan terbaharu dalam pemprosesan imej UAV. Dalam pertanian, petani boleh menggunakan UAV untuk membuat keputusan yang berkesan untuk mencapai penjimatan kos dan masa, menerima rekod kerosakan yang cepat dan tepat, dan menjangkakan kemungkinan masalah. Berbeza dengan platform udara konvensional, UAV boleh mengurangkan perbelanjaan operasi dan mengurangkan bahaya akses di lokasi yang sukar sambil mengekalkan potensi ketepatan tinggi. Kertas kerja mereka meringkaskan pelbagai kelebihan UAV, terutamanya dari segi ketepatan dan resolusi.
Di antara baki tiga belas penerbitan yang paling banyak disebut antara 2011 dan 2021, kami mendapati penumpuan yang lebih besar pada penyelidikan yang berkaitan dengan aplikasi dron dalam misi pengimejan (Bendig et al., 2014; Ma et al., 2017; Zarco-Tejada et al., 2014) , pertanian ketepatan (Candiago et al., 2015; Honkavaara et al., 2013a), vitikultur ketepatan (Matese et al., 2015), penilaian tekanan air (Gago et al., 2015), dan pemantauan tumbuh-tumbuhan (Aasen et al. , 2015a). Pada tahun-tahun awal, penyelidik memberi tumpuan
lebih lanjut mengenai membangunkan sistem berasaskan UAV kos rendah, ringan dan tepat untuk pertanian; penyelidikan yang lebih terkini telah lebih menumpukan pada ulasan aplikasi UAV untuk pertanian dan ukur lapangan. Ringkasnya, analisis ini mendedahkan bahawa penerbitan yang berpengaruh kebanyakannya telah memberikan ulasan kajian terdahulu untuk menilai status saintifik dan teknologi semasa UAV dan membangunkan sistem UAV untuk menyokong pertanian ketepatan. Menariknya, kami tidak menemui kajian yang menggunakan empirikal
metodologi atau kajian kes deskriptif, yang membentuk jurang pengetahuan yang ketara dan memerlukan lebih banyak penyelidikan mengenai topik ini.
Analisis petikan bersama
Menurut Gmür (2006), analisis petikan bersama mengenal pasti penerbitan yang serupa dan mengelompokkannya. Pemeriksaan yang teliti terhadap sesuatu kluster boleh mendedahkan bidang penyelidikan yang sama di kalangan penerbitan. Kami menyiasat petikan bersama kesusasteraan yang berkaitan dengan dron pertanian untuk menggambarkan bidang subjek yang berkaitan dan mengesan corak intelektual penerbitan. Dalam hal ini, Small (1973) mengesyorkan penggunaan analisis cocitation untuk mengkaji penyelidikan yang paling berpengaruh dan mani.
dalam sesuatu disiplin. Untuk mengehadkan set kepada artikel paling banyak (Goyal & Kumar, 2021), kami menetapkan ambang petikan bersama sebanyak 25, bermakna dua artikel mesti telah dipetik bersama dalam senarai rujukan 25 atau lebih penerbitan berbeza. Pengelompokan juga dijalankan dengan saiz kelompok minimum 1 dan tanpa sebarang kaedah untuk menggabungkan kelompok yang lebih kecil dengan yang lebih besar. Hasilnya, enam kluster telah dihasilkan berdasarkan persamaan kajian dan struktur inteleknya. Jadual 6 menunjukkan taburan penerbitan dalam setiap kelompok.
Kluster 1: Kluster ini mengandungi lapan belas dokumen yang diterbitkan selepas Penerbitan dalam kluster ini membincangkan peranan dron dalam menyokong pemantauan alam sekitar, pengurusan tanaman dan pengurusan rumpai. Sebagai contoh, Manfreda et al. (2018) memberikan gambaran keseluruhan penyelidikan dan pelaksanaan semasa UAV dalam pemantauan ekosistem pertanian semula jadi dan berpendapat bahawa teknologi itu menawarkan potensi yang sangat besar untuk secara drastik meningkatkan pemantauan alam sekitar dan mengurangkan
jurang yang sedia ada antara pemerhatian lapangan dan udara konvensional dan penderiaan jauh bawaan angkasa. Ini boleh dilakukan dengan menawarkan kapasiti baharu untuk mendapatkan semula temporal yang lebih baik dan cerapan spatial ke dalam kawasan yang luas dengan cara yang berpatutan. UAV sentiasa boleh merasakan persekitaran dan menghantar data yang terhasil kepada entiti pintar, terpusat/terdesentralisasi yang mengawal penderia untuk mengenal pasti masalah akhirnya, seperti kekurangan penyakit atau pengesanan air (Padua ´ et al., 2017). Adao ˜ et al. (2017) menyatakan bahawa UAV adalah ideal untuk menilai keadaan tumbuhan dengan menangkap sejumlah besar data mentah yang berkaitan dengan status air, anggaran biojisim dan penilaian kekuatan. Penderia yang dipasang UAV juga boleh digunakan dengan segera dalam keadaan persekitaran yang sesuai untuk membolehkan penangkapan data penderiaan jauh tepat pada masanya (Von Bueren et al., 2015). Melalui UAV, petani dapat menjalankan aktiviti pertanian dalaman dengan memperoleh ukuran dari hampir mana-mana tempat dalam ruang tiga dimensi persekitaran pertanian dalaman (cth, rumah hijau), dengan itu memastikan kawalan iklim tempatan dan pemantauan tumbuhan (Roldan ´ et al ., 2015). Dalam konteks ketepatan
pertanian, keputusan pengurusan tanaman memerlukan data tanaman yang tepat dan boleh dipercayai dengan resolusi temporal dan spatial yang sesuai (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019). Atas sebab ini, Agüera Vega et al. (2015) menggunakan sistem penderia berbilang spektrum yang dipasang UAV untuk memperoleh imej tanaman bunga matahari semasa musim tanam. Begitu juga, Huang et al. (2009) ambil perhatian bahawa penderiaan jauh berdasarkan UAV boleh memudahkan pengukuran tanaman dan tanah daripada data spektrum yang dikumpul. Verger et al. (2014) membangunkan dan menguji teknik untuk menganggar indeks kawasan hijau (GAI) daripada ukuran pantulan UAV dalam aplikasi pertanian ketepatan, memfokuskan pada tanaman gandum dan biji sesawi. Oleh itu, dron menyediakan kemungkinan baharu untuk mendapatkan semula maklumat keadaan tanaman dengan lawatan semula yang kerap dan resolusi spatial yang tinggi (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016).
Pengelompokan penerbitan berpengaruh mengenai dron pertanian.
| Kelompok | Tema yang luas | Rujukan |
| 1 | Pemantauan alam sekitar, tanaman pengurusan, pengurusan rumpai | (Ad˜ ao et al., 2017; Agüera Vega et al., 2015; de Castro et al., 2018; Gomez-Cand ´ pada ´ et al., 2014; YB Huang et al., 2013; Khanal et al., 2017; Lopez-Granados, ´ 2011; Manfreda et al., 2018; P´ adua et al., 2017; Pena ˜ et al., 2013; P'erez-Ortiz et al., 2015; Rasmussen et al., 2013, 2016; Torres-S´ anchez et al., 2014; Torres-Sanchez, ´ Lopez-Granados, ´ & Pena, ˜ 2015; Verger et al., 2014; Von Bueren et al., 2015; C. Zhang & Kovacs, 2012) |
| 2 | Fenotaip jauh, hasil anggaran, model permukaan tanaman, mengira tumbuhan | (Bendig et al., 2013, 2014; Geipel et al., 2014; Gnadinger ¨ & Schmidhalter, 2017; Haghighattalab et al., 2016; Holman et al., 2016; Jin et al., 2017; W. Li et al., 2016; Maimaitijiang et al., 2017; Sankaran et al., 2015; Schirrmann et al., 2016; Shi et al., 2016; Yue et al., 2017; X. Zhou et al., 2017) |
| 3 | Pengimejan terma untuk air, pengimejan multispektral | (Baluja et al., 2012; Berni et al., 2009b; Berni et al., 2009a; Candiago et al., 2015; Gago et al., 2015; Gonzalez-Dugo et al., 2013, 2014; Grenzdorffer ¨ et al., 2008; Khaliq et al., 2019; Matese et al., 2015; Ribeiro-Gomes et al., 2017; Santesteban et al., 2017; Uto et al., 2013) |
| 4 | Pengimejan hipersektral, spektrum pengimejan | (Aasen et al., 2015a; Bareth et al., 2015; Hakala et al., 2013; Honkavaara et al., 2013a; Lucieer et al., 2014; Saari et al., 2011; Suomalainen et al., 2014) |
| 5 | Aplikasi Pemetaan 3D | (Jim´enez-Brenes et al., 2017; Nex & Remondino, 2014; Salamí et al., 2014; Torres-S´ anchez, Lopez- ´ Granados, Serrano, et al., 2015; Zahawi et al., 2015; Zarco-Tejada et al., 2014) |
| 6 | Pengawasan pertanian | (SR Herwitz et al., 2004; Hunt et al., 2010; CCD Lelong et al., 2008; Primicerio et al., 2012; Xiang & Tian, 2011) |
Tambahan pula, dron berguna untuk tugas mencabar dalam pertanian, termasuk pemetaan rumpai. Imej yang ditangkap oleh peranti telah membuktikan kegunaannya untuk pengesanan rumpai awal di ladang (de Castro et al., 2018; Jim´enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados ´ et al., 2016; Rozenberg et al., 2021). Dalam hal ini, de Castro et al. (2018) berpendapat bahawa gabungan imejan UAV dan Analisis Imej Berasaskan Objek (OBIA) telah membolehkan pengamal mengatasi isu mengautomasikan pengesanan awal dalam tanaman padang rumput awal musim, yang merupakan langkah besar ke hadapan dalam penyelidikan rumpai. Begitu juga, Pena ˜ et al. (2013) menunjukkan bahawa penggunaan imej resolusi spatial ultra tinggi daripada UAV bersama dengan prosedur OBIA memungkinkan untuk menjana peta rumpai dalam tanaman jagung awal yang boleh digunakan dalam merancang pelaksanaan langkah kawalan rumpai dalam musim, tugas di luar kemampuan satelit dan imej bawaan udara tradisional. Berbanding dengan klasifikasi imej atau algoritma pengesanan objek, teknik segmentasi semantik lebih berkesan dalam tugas pemetaan rumpai (J. Deng et al., 2020), sekali gus membolehkan petani mengesan keadaan ladang, mengurangkan kerugian, dan meningkatkan hasil sepanjang musim tanam (Ramesh). et al., 2020). Segmentasi semantik berasaskan pembelajaran mendalam juga boleh memberikan ukuran yang tepat bagi penutupan tumbuh-tumbuhan daripada imej udara resolusi tinggi (Ramesh et al., 2020; A. Zheng et al., 2022). Walaupun potensi mereka untuk jarak jauh
pengelasan piksel pengesanan, teknik pembahagian semantik memerlukan pengiraan yang ketara dan memori GPU yang sangat tinggi (J. Deng et al., 2020).
Berdasarkan pembelajaran mesin dan UAV, P´erez-Ortiz et al. (2015) mencadangkan pendekatan pemetaan rumpai untuk menyediakan strategi kawalan rumpai khusus tapak apabila petani mengamalkan kawalan rumpai awal selepas kemunculan. Akhirnya, Rasmussen et al. (2013) menekankan bahawa dron menyediakan penderiaan yang murah dengan fleksibiliti resolusi spatial yang hebat. Secara keseluruhannya, penerbitan dalam kluster ini menumpukan pada penerokaan potensi UAV untuk menyokong penderiaan jauh, pemantauan tanaman dan pemetaan rumpai. Penyelidikan mendalam tambahan diperlukan untuk menyiasat lebih lanjut bagaimana aplikasi dron dalam pemantauan alam sekitar, pengurusan tanaman, dan pemetaan rumpai boleh mencapai pertanian yang lebih mampan (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J . Su, Liu, et al., 2018) dan menangani isu tadbir urus teknologi ini dalam aplikasi insurans tanaman (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021). Penyelidik harus menumpukan perhatian pada mengesahkan pengukuran yang dikumpul UAV dengan teknik pemprosesan yang cekap untuk meningkatkan kualiti tertinggi data yang diproses (Manfreda et al., 2018). Tambahan pula, pembangunan algoritma yang sesuai yang mengenali piksel yang memaparkan rumpai dalam imej digital dan menghapuskan latar belakang yang tidak relevan semasa pemetaan rumpai UAV diperlukan (Gaˇ sparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; Lopez- ´ Granados et al., 2016). Penyelidikan tambahan mengenai penggunaan teknik segmentasi semantik dalam pengecaman tumbuhan, klasifikasi daun, dan pemetaan penyakit adalah dialu-alukan (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020).
Kluster 2. Penerbitan dalam kluster ini memfokuskan kepada beberapa aspek dron pertanian. Berkaitan dengan fenotaip jauh, Sankaran et al. (2015) mengkaji potensi penggunaan pengimejan udara beraltitud rendah, resolusi tinggi dengan UAV untuk fenotaip cepat tanaman di lapangan, dan mereka berpendapat bahawa, berbanding dengan platform penderiaan berasaskan darat, UAV kecil dengan penderia yang mencukupi menawarkan beberapa kelebihan. , seperti akses yang lebih mudah ke lapangan, data resolusi tinggi, pengumpulan data yang cekap,
penilaian pantas keadaan pertumbuhan lapangan, dan kos operasi yang rendah. Walau bagaimanapun, penulis juga ambil perhatian bahawa penggunaan berkesan UAV untuk fenotaip medan bergantung pada dua elemen asas, iaitu, ciri UAV (cth, keselamatan, kestabilan, kedudukan, autonomi) dan ciri sensor (cth, resolusi, berat, panjang gelombang spektrum, medan pandangan). Haghighattalab et al. (2016) mencadangkan saluran paip pemprosesan imej separa automatik untuk mendapatkan semula data peringkat plot daripada imejan UAV dan mempercepatkan proses pembiakan. Holman et al. (2016) membangunkan tinggi
sistem fenotaip medan throughput dan menyerlahkan bahawa UAV mampu mengumpul data fenotip berasaskan medan yang berkualiti, besar, dan peranti itu berkesan untuk kawasan yang luas dan merentasi lokasi medan yang berbeza.
Oleh kerana anggaran hasil adalah maklumat yang sangat penting, terutamanya apabila tersedia tepat pada masanya, terdapat potensi untuk UAV menyediakan semua pengukuran medan dan memperoleh data berkualiti tinggi dengan cekap (Daakir et al., 2017; Demir et al., 2018 ; Enciso et al., 2019; Dalam hal ini, Jin et al. (2018) mengambil kesempatan daripada imejan resolusi tinggi yang diperolehi oleh UAV pada ketinggian yang sangat rendah untuk membangunkan dan menilai kaedah untuk menganggarkan kepadatan tumbuhan gandum pada peringkat kemunculan. Menurut pengarang, UAV mengatasi batasan sistem rover yang dilengkapi dengan kamera dan mewakili kaedah bukan invasif untuk menganggarkan ketumpatan tumbuhan dalam tanaman, membolehkan petani mencapai daya pemprosesan tinggi yang diperlukan untuk fenotaip lapangan bebas daripada kebolehdagangan tanah. Li et al. (2012) mengumpul beratus-ratus imej stereo dengan resolusi yang sangat tinggi menggunakan sistem berasaskan UAV untuk menganggar parameter jagung, termasuk ketinggian kanopi dan biojisim di atas tanah. Akhirnya, Yue et al. (2017) mendapati ketinggian tanaman yang ditentukan daripada UAV boleh meningkatkan anggaran biojisim di atas tanah (AGB).
Pendekatan untuk memantau pertumbuhan tanaman ialah idea membangunkan model permukaan tanaman (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021). Beberapa kajian menyerlahkan kemungkinan imej yang diambil daripada UAV untuk menangkap ketinggian tumbuhan dan memantau pertumbuhannya. Contohnya, Bendig et al. (2013) menyifatkan pembangunan model permukaan tanaman pelbagai temporal dengan resolusi sangat tinggi kurang daripada 0.05 m menggunakan UAV. Mereka bertujuan untuk mengesan tanaman
kebolehubahan pertumbuhan dan pergantungannya pada rawatan tanaman, kultivar, dan tekanan. Bendig et al. (2014) menggunakan UAV untuk menganggar biojisim segar dan kering berdasarkan ketinggian tumbuhan yang diekstrak daripada model permukaan tanaman dan mendapati bahawa, tidak seperti platform bawaan udara dan pengimbasan laser darat, imej resolusi tinggi daripada UAV boleh meningkatkan ketepatan pemodelan ketinggian tumbuhan dengan ketara untuk pertumbuhan yang berbeza. peringkat. Dalam nada yang sama, Geipel et al. (2014) menggunakan UAV dalam penyelidikan mereka untuk memperoleh imejan
set data untuk ramalan hasil bijirin jagung pada tiga fasa pertumbuhan berbeza dari awal hingga pertengahan musim dan membuat kesimpulan bahawa gabungan pemodelan spektrum dan spatial berdasarkan imej udara dan model permukaan tanaman adalah kaedah yang sesuai untuk meramalkan hasil jagung pertengahan musim. Akhir sekali, Gnadinger ¨ dan Schmidhalter (2017) meneliti utiliti UAV dalam fenotaip ketepatan dan menekankan bahawa penggunaan teknologi ini boleh meningkatkan pengurusan ladang dan membolehkan eksperimen di lapangan untuk tujuan pembiakan dan agronomik. Secara keseluruhannya, kami mendapati bahawa penerbitan dalam kelompok 2 menumpukan pada kelebihan utama UAV dalam jarak jauh.
fenotaip, anggaran hasil, pemodelan permukaan tanaman dan pengiraan tumbuhan. Kajian masa depan boleh menggali lebih mendalam dengan membangunkan kaedah baharu untuk fenotaip jauh yang boleh mengautomasikan dan mengoptimumkan pemprosesan data deria jauh (Barabaschi et al., 2016; Liebisch et al., 2015; Mochida et al., 2015; S. Zhou et al. ., 2021). Selain itu, prestasi penderia IoT yang dipasang pada UAV dan pertukaran antara kos, buruh dan ketepatan anggaran hasil perlu dikaji dalam
masa depan (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). Akhirnya, terdapat keperluan untuk membangunkan kaedah pemprosesan imej yang cekap yang boleh menjana maklumat yang boleh dipercayai, memaksimumkan kecekapan dalam pengeluaran pertanian, dan meminimumkan kerja pengiraan manual petani (RU Khan et al., 2021; Koh et al., 2021; Lin & Guo, 2020; C. Zhang et al., 2020).
Kluster 3. Penerbitan dalam kluster ini membincangkan pelbagai jenis sistem pengimejan untuk penderiaan jauh sumber pertanian yang digunakan pada platform UAV. Dalam hal ini, pengimejan terma membolehkan pemantauan suhu permukaan untuk mengelakkan kerosakan tanaman dan mengesan tekanan kemarau lebih awal (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; Yeom, 2021). Baluja et al. (2012) menegaskan bahawa penggunaan kamera berbilang spektrum dan terma di atas kapal
UAV membolehkan penyelidik mendapatkan imej resolusi tinggi dan menilai status air anggur. Ini berguna untuk membangunkan model penjadualan air baru menggunakan data penderiaan jauh (Baluja et al., 2012). Kerana
kapasiti muatan terhad UAV, Ribeiro-Gomes et al. (2017) mempertimbangkan penyepaduan kamera terma tidak disejukkan ke dalam UAVS untuk menentukan tekanan air dalam loji, yang menjadikan jenis UAV ini lebih cekap dan berdaya maju daripada penderiaan jauh berasaskan satelit tradisional dan UAV yang dilengkapi dengan kamera terma yang disejukkan. Menurut pengarang, kamera terma yang tidak disejukkan adalah lebih ringan daripada kamera yang disejukkan, memerlukan penentukuran yang sesuai. Gonzalez-Dugo et al. (2014) menunjukkan bahawa imejan haba berkesan menjana peta spatial indeks tekanan air tanaman untuk menilai status air dan mengukur tekanan air di antara dan dalam kebun sitrus. Gonzalez-Dugo et al. (2013) dan Santesteban et al. (2017) menyiasat penggunaan imej terma UAV resolusi tinggi untuk menganggarkan kebolehubahan status air bagi kebun komersial dan ladang anggur.
Pengimejan berbilang spektrum boleh memberikan data yang besar berbanding dengan imej RGB (Merah, Hijau, dan Biru) tradisional (Ad˜ ao et al., 2017; Navia et al., 2016). Data spektrum ini, bersama-sama dengan data spatial, boleh membantu dalam pengelasan, pemetaan, ramalan, ramalan, dan tujuan pengesanan (Berni et al., 2009b). Menurut Candiago et al. (2015), pengimejan multispektral berasaskan UAV boleh menyumbang secara besar-besaran kepada penilaian tanaman dan pertanian yang tepat sebagai sumber yang boleh dipercayai dan cekap. Juga,
Khaliq et al. (2019) membuat perbandingan antara satelit dan pengimejan multispektral berasaskan UAV. Imej berasaskan UAV menghasilkan lebih tepat dalam menerangkan kebolehubahan ladang anggur serta peta kekuatan untuk mewakili kanopi tanaman. Secara ringkasnya, artikel dalam kelompok ini membincangkan penggabungan penderia pengimejan terma dan pelbagai spektrum ke dalam UAV pertanian. Sehubungan itu, lebih banyak penyelidikan diperlukan untuk memahami cara pengimejan terma dan multispektral boleh disepadukan dengan AI
teknik (cth, pembelajaran mendalam) untuk mengesan tekanan tumbuhan (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021). Wawasan sedemikian akan membantu memastikan pengesanan yang lebih cekap dan tepat serta pemantauan pertumbuhan tumbuhan, tekanan, dan fenologi (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., 2020).
Kluster 4. Kelompok ini terdiri daripada tujuh kertas kerja yang berkisar tentang peranan penting pengimejan spektrum dan pengimejan hiperspektral dalam menyokong amalan pertanian. Pengimejan hiperspektral telah menetapkan dirinya sebagai kaedah penderiaan jauh yang membolehkan penilaian kuantitatif sistem bumi (Schaepman et al., 2009). Untuk lebih tepat, ia membolehkan pengenalpastian bahan permukaan, kuantifikasi kepekatan (relatif), dan penetapan perkadaran komponen permukaan
dalam piksel bercampur (Kirsch et al., 2018; Zhao et al., 2022). Dengan kata lain, resolusi spektrum yang lebih tinggi yang disediakan oleh sistem hiperspektral membolehkan anggaran pelbagai parameter yang lebih tepat, seperti sifat vegetarian atau kandungan air daun (Suomalainen et al., 2014). Para penyelidik dalam kelompok ini menyiasat pelbagai aspek sistem tersebut. Antara lain, Aasen et al. (2015b) menawarkan pendekatan unik untuk memperoleh maklumat hiperspektral tiga dimensi daripada ringan
kamera syot kilat yang digunakan pada UAV untuk pemantauan tumbuh-tumbuhan. Lucieer et al. (2014) membincangkan reka bentuk, pembangunan dan operasi udara bagi UAS hiperspektral novel serta penentukuran, analisis dan tafsiran data imej yang dikumpulkan dengannya. Akhirnya, Honkavaara et al. (2013b) membangunkan pendekatan pemprosesan komprehensif untuk imej spektrum berasaskan interferometer FabryPerot dan menunjukkan penggunaannya dalam prosedur anggaran biojisim untuk pertanian ketepatan. Laluan masa depan yang berpotensi untuk kluster semasa ini termasuk menekankan keperluan untuk penambahbaikan teknikal dalam teknologi sensor (Aasen et al., 2015b) serta keperluan untuk menggabungkan dan meningkatkan teknologi pelengkap, khususnya data besar dan analitik (Ang & Seng, 2021; Radoglou -Grammatikis et al., 2020; Yang terakhir ini terutamanya berpunca daripada data yang sentiasa berkembang yang dijana oleh pelbagai penderia yang dilaksanakan dalam pertanian pintar (C. Li & Niu, 2019; A. Rejeb et al., 2020; Y. Su & Wang, 2022).
Kluster 5. Penerbitan dalam kluster ini mengkaji aplikasi 3Dmapping berasaskan dron. Menggunakan dron untuk pemetaan 3D boleh mengurangkan kerja lapangan yang kompleks dan meningkatkan kecekapan dengan ketara (Torres-Sanchez ´ et al., 2015). Lima artikel dalam kluster itu tertumpu terutamanya pada aplikasi pemantauan tumbuhan. Sebagai contoh, untuk mendapatkan data tiga dimensi mengenai kawasan kanopi, ketinggian pokok, dan isipadu mahkota, Torres-Sanchez ´ et al. (2015) menggunakan teknologi UAV untuk menjana model permukaan digital dan kemudian pendekatan analisis imej berasaskan objek (OBIA). Selanjutnya, Zarco-Tejada et al. (2014) mengukur ketinggian pokok dengan menyepadukan teknologi UAV dan kaedah pembinaan semula foto tiga dimensi. Jim´enez-Brenes Lopez-Granados, ´ De Castro, et al. (2017) menunjukkan proses baharu untuk pemantauan 3D berbilang masa dan berpuluh-puluh pokok zaitun dengan menyepadukan teknologi UAV dengan metodologi OBIA termaju. Laluan yang menarik untuk kerja-kerja masa hadapan dalam kelompok ini termasuk sama ada menambah baik semasa
metodologi (Zarco-Tejada et al., 2014) untuk tujuan pemodelan permukaan digital (Ajayi et al., 2017; Jaud et al., 2016), seperti OBIA (de Castro et al., 2018, 2020; Ventura et al. , 2018), dan pembinaan semula foto atau membangunkan kaedah novel (Díaz-Varela et al., 2015; Torres-S' anchez et al., 2015).
Kluster 6. Kluster ini membincangkan peranan dron dalam pengawasan pertanian. UAV boleh melengkapkan dan mengatasi kelemahan pengimejan satelit dan pesawat. Sebagai contoh, mereka boleh memberikan resolusi tinggi berhampiran pengimejan masa nyata dengan kurang bahan api atau cabaran pandu, menghasilkan pengawasan berterusan dan masa nyata serta penambahbaikan dalam membuat keputusan (S. Herwitz et al., 2004). Satu lagi sumbangan utama UAV ialah keupayaan mereka untuk menyediakan data khusus tapak untuk pertanian ketepatan atau pertanian khusus tapak kerana resolusi tinggi mereka, data terperinci tentang pelbagai parameter membolehkan petani membahagikan tanah kepada bahagian yang homogen dan merawatnya dengan sewajarnya (Hunt et al. , 2010; CC Lelong et al., 2008; Pengawasan pertanian berasaskan UAV tersebut boleh menyokong pemantauan keselamatan makanan dan membuat keputusan (SR Herwitz et al., 2012). Untuk memajukan penyelidikan dalam pengawasan pertanian, bukan sahaja penambahbaikan dalam penderia, UAV, dan teknologi lain yang berkaitan serta kaedah komunikasi dan pemindahan data mereka diperlukan (Ewing et al., 2004; Shuai et al., 2020), tetapi juga mengintegrasikan dron dengan pelbagai teknologi untuk mengoptimumkan tugas yang berbeza berhubung dengan pertanian pintar, seperti pemantauan, pengawasan pertanian dan membuat keputusan, adalah kawasan penyelidikan berpotensi tinggi (Alsamhi et al., 2019; Popescu et al., 2021; Vuran et al., 2020). Dalam hal ini, IoT, WSN dan data besar menawarkan keupayaan pelengkap yang menarik (van der Merwe et al., 2018). Kos pelaksanaan, penjimatan kos, kecekapan tenaga dan keselamatan data adalah antara bidang yang kurang diteliti untuk penyepaduan tersebut (Masroor et al., 2020).
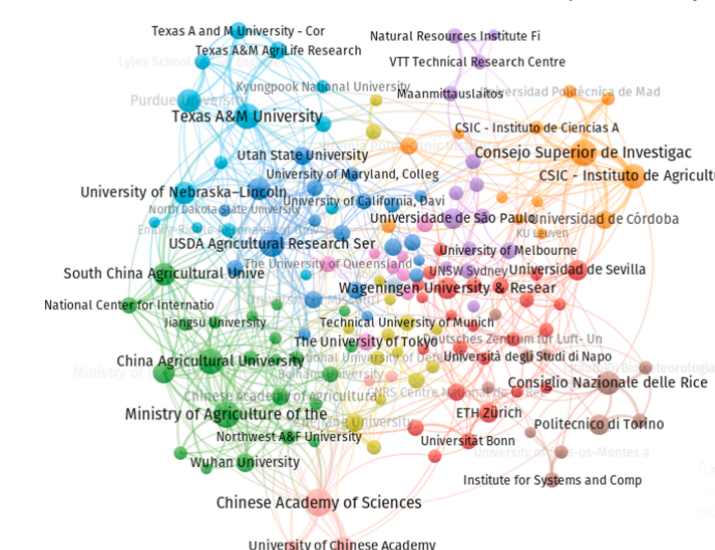
Negara dan institusi akademik
Langkah terakhir termasuk penyiasatan negara asal dan gabungan akademik pengarang. Melalui analisis ini, kami berhasrat untuk lebih memahami taburan geografi sarjana yang menyumbang kepada aplikasi dron dalam pertanian. Perlu diberi perhatian untuk melihat kepelbagaian negara dan institusi akademik. Dari perspektif negara, AS, China, India dan Itali menduduki tempat teratas dalam senarai dari segi bilangan penerbitan (Jadual 7). arus
penyelidikan mengenai dron pertanian sebahagian besarnya tertumpu di negara-negara Amerika Utara dan Asia, terutamanya disebabkan penglibatan tinggi mereka dalam aplikasi pertanian ketepatan. Sebagai contoh, di Amerika Syarikat, pasaran dron pertanian dianggarkan pada 841.9 juta USD pada tahun 2020, menyumbang kira-kira 30% daripada bahagian pasaran global (ReportLinker, 2021). Dengan kedudukan sebagai ekonomi terbesar dunia, China diramalkan akan mencapai anggaran saiz pasaran sebanyak 2.6 bilion USD pada tahun 2027. Negara ini merayu untuk drone pertanian untuk mengatasi isu produktiviti dan mencapai hasil yang lebih baik, pengurangan buruh dan input pengeluaran yang lebih rendah. Walau bagaimanapun, penggunaan teknologi di China juga didorong oleh faktor seperti saiz populasi dan keperluan untuk menginovasi dan menambah baik amalan pengurusan tanaman sedia ada.
Negara dan universiti/organisasi paling produktif yang menyumbang kepada
penyelidikan berkaitan dron pertanian.
| Kedudukan | negara |
| 1 | USA |
| 2 | China |
| 3 | India |
| 4 | Italy |
| 5 | Sepanyol |
| 6 | Jerman |
| 7 | Brazil |
| 8 | Australia |
| 9 | Jepun |
| 10 | United Kingdom |
| Kedudukan | Universiti/ Pertubuhan |
| 1 | Akademi Sains China |
| 2 | Kementerian Pertanian Republik Rakyat China |
| 3 | Majlis Penyelidikan Ilmiah atasan |
| 4 | Texas A & M University |
| 5 | Universiti Pertanian China |
| 6 | Perkhidmatan Penyelidikan Pertanian USDA |
| 7 | CSIC – Instituto de Agricultura Sostenible IAS |
| 8 | Purdue University |
| 9 | Majlis Penyelidikan Kebangsaan |
| 10 | Universiti Pertanian China Selatan |
Dari perspektif universiti dan organisasi, Akademi Sains China mendahului senarai dari segi bilangan penerbitan, diikuti oleh Kementerian Pertanian Republik Rakyat China dan Consejo Superior de Investigaciones Científicas. Akademi Sains Cina diwakili oleh pengarang Liao Xiaohan dan Li Jun; Han Wenting mewakili Kementerian Pertanian Republik Rakyat China; dan Consejo Superior de Investigaciones Científicas diwakili oleh Lopez-Granados, ´ F. dan Pena, ˜ Jos´e María S. Dari Amerika Syarikat, universiti seperti Texas A&M University dan Purdue University mendapati mereka
menyebut. Universiti dengan bilangan penerbitan tertinggi dan hubungannya ditunjukkan dalam Rajah 4. Selain itu, senarai ini termasuk institusi seperti Consiglio Nazionale delle Ricerche dan Consejo Superior de Investigaciones Científicas yang aktif dalam penyelidikan saintifik, tetapi bukan institusi akademik .
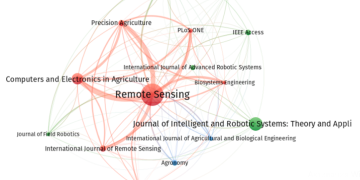
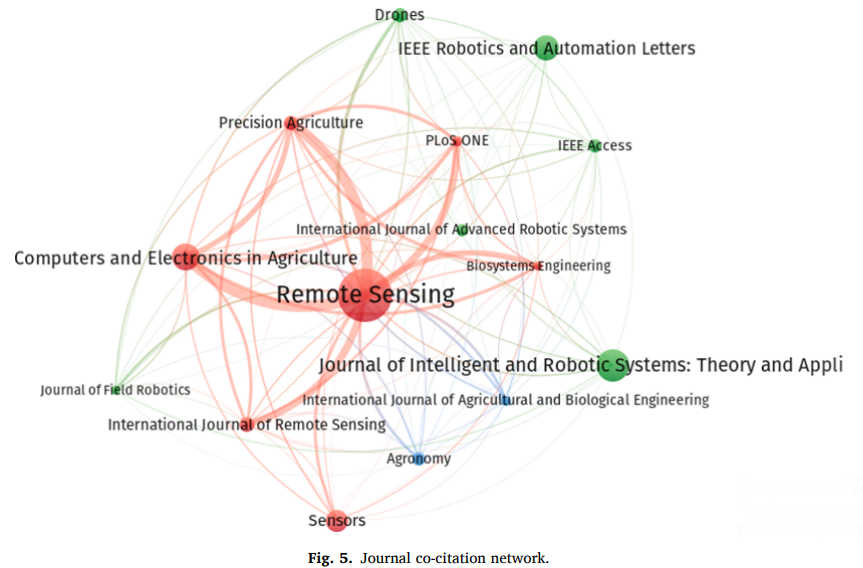
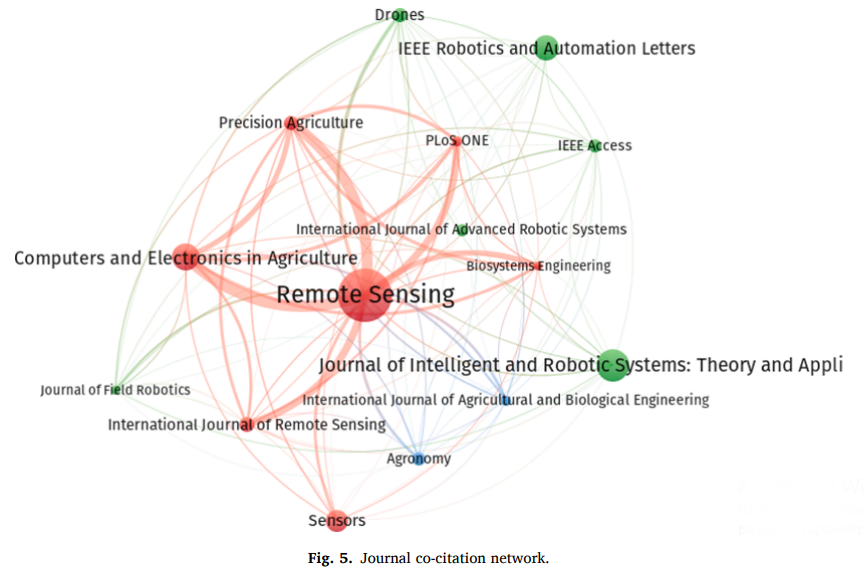
Pilihan kami termasuk pelbagai jenis jurnal, merangkumi hampir semua data yang tersedia. Seperti yang ditunjukkan dalam Jadual 8, Penderiaan Jauh dengan 258 artikel berada di kedudukan teratas, diikuti oleh Jurnal Sistem Pintar dan Robotik: Teori dan Aplikasi dengan 126 dan Komputer dan Elektronik dalam Pertanian dengan 98 artikel. Walaupun Remote Sensing kebanyakannya tertumpu pada aplikasi dan pembangunan dron, Komputer dan Elektronik dalam Pertanian terutamanya meliputi kemajuan dalam perkakasan komputer, perisian, elektronik, dan sistem kawalan dalam pertanian. Cawangan merentas kawasan, seperti IEEE Robotics dan Automation Letters dengan 87 penerbitan dan IEEE Access dengan 34 penerbitan, juga merupakan cawangan utama dalam bidang ini. Lima belas cawangan teratas telah menyumbang kepada kesusasteraan dengan 959 dokumen, iaitu kira-kira 20.40% daripada semua penerbitan. Analisis petikan bersama jurnal membolehkan kami mengkaji kepentingan dan persamaan antara penerbitan. Analisis petikan bersama menghasilkan tiga kelompok, seperti yang ditunjukkan dalam Rajah 5. Kelompok merah terdiri daripada jurnal seperti Penderiaan Jauh, Komputer dan Elektronik dalam Pertanian, Penderia,
dan Jurnal Antarabangsa Penderiaan Jauh. Kesemua cawangan ini adalah jurnal bereputasi tinggi dalam bidang penderiaan jauh dan pertanian ketepatan. Kelompok hijau mengandungi jurnal yang berurusan dengan robotik, seperti Journal of Intelligent and Robotic Systems: Theory and Applications, IEEE Robotics and Automation Letters, IEEE Access, dan Drones. Cawangan ini kebanyakannya menerbitkan kertas kerja mengenai automasi dan berguna untuk jurutera pertanian. Kelompok terakhir dibentuk oleh jurnal yang berkaitan dengan agronomi dan kejuruteraan pertanian, seperti Agronomi dan Jurnal Antarabangsa Kejuruteraan Pertanian dan Biologi.
15 jurnal teratas dalam penyelidikan berkaitan dron pertanian.
| Kedudukan | Jurnal | Pengiraan |
| 1 | Penginderaan Jauh | 258 |
| 2 | Jurnal Sistem Pintar dan Robotik: Teori dan Aplikasi | 126 |
| 3 | Komputer dan Elektronik dalam Pertanian | 98 |
| 4 | Robotik dan Surat Automasi IEEE | 87 |
| 5 | Sensor | 73 |
| 6 | Jurnal Antarabangsa Penderiaan Jauh | 42 |
| 7 | Pertanian Ketepatan | 41 |
| 8 | Drone | 40 |
| 9 | Agronomi | 34 |
| 10 | Akses IEEE | 34 |
| 11 | Jurnal Antarabangsa Sistem Robotik Lanjutan | 31 |
| 12 | Jurnal Antarabangsa Kejuruteraan Pertanian dan Biologi | 25 |
| 13 | PLOS SATU | 25 |
| 14 | Jurnal Robotik Lapangan | 23 |
| 15 | Kejuruteraan Biosystems | 23 |
Kesimpulan
Ringkasan
Dalam kajian ini, kami merumuskan dan menganalisis penyelidikan sedia ada mengenai dron pertanian. Menggunakan pelbagai teknik bibliometrik, kami berusaha untuk mendapatkan pemahaman yang lebih baik tentang struktur intelektual penyelidikan berkaitan dron pertanian. Ringkasnya, ulasan kami menawarkan beberapa sumbangan dengan mengenal pasti dan membincangkan kata kunci dalam kesusasteraan, mendedahkan kelompok pengetahuan sambil membentuk komuniti yang serupa secara semantik dalam bidang dron, menggariskan penyelidikan terdahulu dan mencadangkan arah penyelidikan masa depan. Di bawah, kami menggariskan penemuan utama semakan mengenai pembangunan dron pertanian:
• Keseluruhan kesusasteraan telah berkembang pesat dan menarik perhatian yang besar sepanjang dekad yang lalu, seperti yang ditunjukkan oleh peningkatan bilangan artikel selepas 2012. Walaupun bidang pengetahuan ini masih belum mencapai kematangan sepenuhnya (Barrientos et al., 2011; Maes & Steppe, 2019), beberapa soalan masih belum dijawab. Sebagai contoh, kegunaan dron dalam pertanian dalaman masih terbuka untuk dibahaskan (Aslan et al., 2022; Krul et al., 2021; Rold´ an et al., 2015). Kerumitan adegan medan dan keadaan pengimejan yang berbeza (cth, bayang-bayang dan pencahayaan) boleh menghasilkan varians dalam kelas spektrum yang lebih tinggi (Yao et al., 2019). Malah dalam fasa penyelidikan kemudian, penyelidik telah dicabar untuk menentukan rancangan penerbangan yang optimum mengikut senario tertentu dan kualiti imej yang diperlukan (Soares et al., 2021; Tu et al.,
2020).
• Kami mendapati bahawa bidang itu telah berkembang daripada membangunkan sistem UAV yang cekap kepada menggabungkan teknik AI, seperti pembelajaran mesin dan pembelajaran mendalam dalam reka bentuk dron pertanian (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020;
• Penyelidikan mengenai dron pertanian kebanyakannya membincangkan penderiaan jauh dengan meneroka potensi teknologi dalam pemantauan alam sekitar, pengurusan tanaman, dan pengurusan rumpai (kluster 1) serta fenotaip jauh dan anggaran hasil (kluster 2). Satu set kajian berpengaruh terhadap dron pertanian termasuk Austin (2010), Berni et al. (2009)a, Herwitz et al. (2004), Nex dan Remondino (2014), dan Zhang dan Kovacs (2012). Kajian-kajian ini membangunkan asas konseptual penyelidikan berkaitan dron dalam konteks pertanian.
• Berkaitan dengan metodologi, kami mendapati bahawa kebanyakan penyelidikan yang dilakukan setakat ini terdiri daripada sama ada reka bentuk sistem, konseptual atau kajian berasaskan kajian (Inoue, 2020; Nex & Remondino, 2014; P´erez-Ortiz et al. , 2015; Yao et al., 2019). Kami juga mendapati kekurangan kaedah empirikal, kualitatif dan berasaskan kajian kes di tempat kerja dalam menyiasat dron pertanian.
• Baru-baru ini, topik yang berkaitan dengan pertanian ketepatan, teknik AI, vitikultur ketepatan, dan penilaian tekanan air telah menarik perhatian yang besar (Espinoza et al., 2017; Gomez-Cand ´ on ´ et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Zhou et al., 2021). Pemeriksaan teliti terhadap kelompok penyelidikan dalam dua era berasingan, 1990–2010 dan 2011–2021, mendedahkan kemajuan struktur intelektual domain. Tempoh dari tahun 1990 hingga 2010 membentuk pembentukan konsep pusat dan konsep dron, yang jelas daripada perbincangan reka bentuk, pembangunan dan pelaksanaan UAV. Dalam era kedua, tumpuan penyelidikan berkembang pada kajian terdahulu, membuat usaha untuk mensintesis kes penggunaan UAV dalam pertanian. Kami juga menemui banyak kajian yang membincangkan aplikasi dron dalam tugas pengimejan dan pertanian ketepatan.
| Kedudukan | Jurnal | Pengiraan |
| 1 | Penginderaan Jauh | 258 |
| 2 | Jurnal Sistem Pintar dan Robotik: Teori dan | 126 |
| Aplikasi | ||
| 3 | Komputer dan Elektronik dalam Pertanian | 98 |
| 4 | Robotik dan Surat Automasi IEEE | 87 |
| 5 | Sensor | 73 |
| 6 | Jurnal Antarabangsa Penderiaan Jauh | 42 |
| 7 | Pertanian Ketepatan | 41 |
| 8 | Drone | 40 |
| 9 | Agronomi | 34 |
| 10 | Akses IEEE | 34 |
| 11 | Jurnal Antarabangsa Sistem Robotik Lanjutan | 31 |
| 12 | Jurnal Antarabangsa Kejuruteraan Pertanian dan Biologi | 25 |
| 13 | PLOS SATU | 25 |
| 14 | Jurnal Robotik Lapangan | 23 |
| 15 | Kejuruteraan Biosystems | 22 |
Implikasi
Kajian bibliometrik kami telah direka bentuk dan dijalankan dengan mengambil kira cendekiawan, petani, pakar pertanian, perunding tanaman dan pereka sistem UAV. Untuk pengetahuan terbaik penulis, ini adalah salah satu ulasan asal pertama yang telah menjalankan analisis bibliometrik yang mendalam tentang
aplikasi dron dalam pertanian. Kami telah menjalankan semakan menyeluruh terhadap badan pengetahuan ini, menggunakan analisis petikan dan petikan bersama penerbitan. Percubaan kami untuk menerangkan struktur intelektual penyelidikan dron juga menawarkan pandangan baharu untuk ahli akademik. Semakan teliti kata kunci yang digunakan dari semasa ke semasa mendedahkan titik panas dan kawasan penyelidikan fokus dalam kesusasteraan berkaitan dron. Tambahan pula, kami membentangkan senarai kajian yang paling banyak dipetik untuk mengenal pasti kerja penyelidikan yang paling berkesan yang disiapkan di lapangan. Pengenalpastian artikel dan kata kunci seterusnya boleh memberikan titik permulaan yang kukuh untuk mendedahkan beberapa jalan untuk kajian masa depan.
Yang penting, kami mendedahkan kluster yang mengklasifikasikan kerja yang setanding dan menghuraikan hasilnya. Kajian yang dikelaskan dalam kelompok membantu dalam memahami struktur intelektual penyelidikan UAV. Terutama, kami menemui kekurangan kajian yang menyiasat faktor penggunaan dron
dan halangan dalam aktiviti pertanian (lihat Jadual 9). Penyelidik masa depan boleh menangani jurang yang berpotensi ini dengan menjalankan penyiasatan empirikal yang menilai faktor penggunaan dron dalam aktiviti pertanian dan keadaan iklim yang berbeza. Tambahan pula, penyelidikan berasaskan kajian kes mengenai keberkesanan dron harus disokong dengan data sebenar dari lapangan. Selain itu, melibatkan petani dan pengurus dalam penyelidikan akademik akan menguntungkan kedua-dua kemajuan teori dan praktikal penyelidikan dron. Kami juga dapat mengenal pasti penyelidik yang paling terkemuka dan sumbangan mereka, yang sangat berharga kerana kesedaran tentang karya seminal terkini boleh menawarkan beberapa panduan untuk usaha akademik masa depan.
Jadual 9
Halangan penggunaan UAV.
| Sawar | Penerangan Produk |
| Keselamatan data | Keselamatan siber merupakan cabaran utama untuk dilaksanakan Penyelesaian IoT (Masroor et al., 2021). |
| Saling kendali dan integrasi | Pelbagai teknologi seperti UAV, WSN, IoT, dll. harus disepadukan dan menghantar data yang meningkatkan tahap kerumitan (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). |
| Kos pelaksanaan | Ini khususnya berlaku untuk petani kecil dan untuk mengintegrasikan pelbagai teknologi termaju ( Masroor et al., 2021). |
| Pengetahuan buruh dan kepakaran | Juruterbang dron yang mahir diperlukan untuk mengendalikan UAV. Juga, melaksanakan pelbagai mutakhir teknologi memerlukan pekerja mahir (YB Huang et al., 2013; Tsouros et al., 2019). |
| Kuasa Enjin dan penerbangan tempoh | Drone tidak boleh dikendalikan selama berjam-jam dan berlindung kawasan yang luas (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| Kestabilan, kebolehpercayaan, dan kemampuan bergerak | Dron tidak stabil semasa keadaan cuaca buruk (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| Had muatan dan kualiti sensor | Dron hanya boleh membawa muatan terhad membawa kepada keupayaan memuatkan sensor kualiti yang lebih rendah (Nebiker et al., 2008). |
| Peraturan | Memandangkan dron boleh berbahaya juga, terdapat yang teruk peraturan di beberapa kawasan (Hardin & Jensen, 2011; Laliberte & Rango, 2011). |
| Pengetahuan petani dan kepentingan | Seperti teknologi canggih lain, dron pelaksanaan yang berjaya memerlukan kepakaran dan juga disertai dengan ketidakpastian (Fisher et al., 2009; Lambert et al., 2004; Stafford, 2000). |
Memandangkan terdapat keperluan berterusan untuk menggunakan sumber yang ada dengan cekap untuk memaksimumkan hasil, petani boleh memanfaatkan dron untuk memastikan pengimbasan ladang mereka dengan pantas, tepat dan kos efektif. Teknologi ini boleh menyokong petani untuk menentukan keadaan tanaman mereka dan menilai status air, peringkat masak, serangan serangga, dan keperluan pemakanan. Keupayaan penderiaan jauh dron boleh memberikan petani data penting untuk menjangka isu pada peringkat awal dan segera membuat campur tangan yang sesuai. Walau bagaimanapun, faedah teknologi hanya boleh direalisasikan jika cabaran ditangani dengan betul. Memandangkan
masalah semasa berkenaan keselamatan data, isu teknologi penderia (cth, kebolehpercayaan atau ketepatan pengukuran), kerumitan penyepaduan, dan kos pelaksanaan yang besar, kajian masa depan juga mesti mengkaji kemungkinan teknikal, ekonomi dan operasi untuk mengintegrasikan dron pertanian dan pemotongan lain- teknologi tepi.
Batasan
Kajian kami mempunyai beberapa batasan. Pertama, penemuan ditentukan oleh penerbitan yang dipilih untuk analisis akhir. Adalah mencabar untuk menangkap semua kajian berkaitan yang berkaitan dengan dron pertanian, terutamanya yang tidak diindeks dalam pangkalan data Scopus. Selanjutnya, proses pengumpulan data dihadkan kepada penetapan kata kunci carian, yang mungkin tidak inklusif dan membawa kepada penemuan yang tidak konklusif. Justeru, kajian akan datang perlu lebih memberi perhatian kepada isu asas pengumpulan data untuk dibuat
kesimpulan yang lebih dipercayai. Satu lagi had berkaitan penerbitan baharu dengan bilangan petikan yang rendah. Analisis bibliometrik adalah berat sebelah terhadap penerbitan terdahulu kerana mereka cenderung menerima lebih banyak petikan selama bertahun-tahun. Kajian terkini memerlukan masa tertentu untuk menarik perhatian dan mengumpul petikan. Akibatnya, kajian terbaru yang membawa anjakan paradigma tidak akan disenaraikan dalam sepuluh karya berpengaruh teratas. Had ini lazim dalam pemeriksaan domain penyelidikan yang pesat membangun seperti dron pertanian. Memandangkan kami telah berunding dengan Scopus untuk mengkaji literatur untuk kerja ini, penyelidik akan datang boleh mempertimbangkan perkara yang berbeza
pangkalan data, seperti Web of Science dan IEEE Xplore, untuk mengembangkan ufuk dan meningkatkan struktur penyelidikan.
Kajian bibliometrik yang berpotensi mungkin mempertimbangkan sumber pengetahuan penting lain seperti kertas persidangan, bab dan buku untuk menjana cerapan baru. Walaupun memetakan dan menyiasat penerbitan global mengenai dron pertanian, penemuan kami tidak mendedahkan sebab di sebalik keluaran ilmiah universiti. Ini membuka jalan kepada bidang penyelidikan baru dalam menerangkan secara kualitatif mengapa sesetengah universiti lebih produktif daripada yang lain apabila ia melibatkan penyelidikan tentang pertanian.
dron. Di samping itu, kajian masa depan boleh memberi gambaran tentang potensi dron untuk meningkatkan kelestarian pertanian dalam beberapa cara seperti pemantauan alam sekitar, pengurusan tanaman, dan pemetaan rumpai seperti yang ditunjukkan oleh beberapa penyelidik (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b). Memandangkan analisis teks tidak dapat dilakukan kerana bilangan kertas terpilih yang tinggi, terdapat keperluan untuk tinjauan literatur sistematik yang mengkaji
kaedah penyelidikan yang digunakan dan penglibatan petani dalam kajian terdahulu. Ringkasnya, analisis kami terhadap penyelidikan dron mendedahkan kaitan tidak kelihatan badan pengetahuan ini. Oleh itu, semakan ini membantu untuk mendedahkan hubungan antara penerbitan dan meneroka struktur intelektual bidang penyelidikan. Ia juga menggambarkan kaitan antara pelbagai aspek kesusasteraan, seperti kata kunci pengarang, gabungan dan negara.
Pengisytiharan Minat Bersaing
Penulis menyatakan bahawa mereka tidak mempunyai kepentingan kewangan atau hubungan peribadi yang bersaing yang diketahui mempengaruhi karya yang dilaporkan dalam makalah ini.
Lampiran 1
TITLE-ABS-KEY (((dron* ATAU “kenderaan udara tanpa pemandu” ATAU uav* ATAU “sistem pesawat tanpa pemandu” ATAU uas ATAU “pesawat yang dipandu jauh”) DAN (pertanian ATAU pertanian ATAU pertanian ATAU petani))) DAN (KECUALI (PUBYEAR, 2022)) DAN (HAD-KEPADA (BAHASA, “Bahasa Inggeris”)).
Rujukan
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. Menjana maklumat hiperspektral 3D dengan kamera syot kilat UAV ringan untuk pemantauan tumbuh-tumbuhan: dari
penentukuran kamera kepada jaminan kualiti. ISPRS J. Photogramm. Sens Jauh 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. Pembangunan algoritma pengecaman corak untuk pengesanan burung automatik daripada imejan kenderaan udara tanpa pemandu.
Tinjauan. Maklumat Tanah. Sci. 65 (1), 37–45.
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021. Rangkaian sensor wayarles dalam pertanian: cerapan daripada analisis bibliometrik. Kelestarian 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., Penilaian kaedah berbeza untuk pengesanan bayang-bayang dalam imejan optik resolusi tinggi dan penilaian kesan bayang-bayang pada pengiraan NDVI, dan sejatanspirasi. Pengairan. Sci. 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. Pengimejan hiperspektral: ulasan tentang penderia berasaskan UAV, data pemprosesan dan
permohonan untuk pertanian dan perhutanan. Penderiaan Jauh 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. Pengimejan berbilang masa menggunakan kenderaan udara tanpa pemandu untuk memantau tanaman bunga matahari. Biosis. En.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. Penjanaan model ketinggian digital yang tepat daripada UAV memperoleh imej bertindih peratusan rendah. Int.
J. Remote Sens. 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. Kajian semula pendekatan pembelajaran mesin untuk pengambilan biojisim dan kelembapan tanah daripada data penderiaan jauh. Penderiaan Jauh 7 (12), 16398–16421.
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., Internet hijau perkara menggunakan UAV dalam rangkaian B5G: Kajian semula aplikasi
dan strategi. Iklan hoc. Netw. 117, 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. Dron untuk Pemantauan Ternakan Bebiri. Dalam: Persidangan Elektroteknikal Mediterranean IEEE ke-20. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. Fenotaip pemprosesan tinggi berasaskan UAV dalam sitrus menggunakan pengimejan berbilang spektrum dan kecerdasan buatan. Penderiaan Jauh 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: Aplikasi berasaskan awan untuk memproses, menganalisis dan memvisualisasikan data yang dikumpul UAV untuk aplikasi pertanian ketepatan menggunakan kecerdasan buatan. Pengiraan. Elektron. Agric. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. Data besar dan pembelajaran mesin dengan maklumat hiperspektral dalam pertanian. Akses IEEE 9, 36699–36718. https://doi.org/10.1109/
AKSES.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. Kajian: teknologi Penternakan Ternakan ketepatan dalam sistem ternakan berasaskan padang rumput. Haiwan 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., Trend pada teknologi maklumat dan komunikasi termaju untuk
meningkatkan produktiviti pertanian: analisis bibliometrik. Agronomi 10 (12), Perkara 12. https://doi.org/10.3390/agronomi10121989.
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011. Gator terbang: ke arah robotik udara dalam occam-π. Commun. Arkitek Proses. 2011, 329–340. https://doi. org/10.3233/978-1-60750-774-1-329.
Arora, SD, Chakraborty, A., 2021. Struktur intelektual penyelidikan tingkah laku mengadu pengguna (CCB): Analisis bibliometrik. J. Perniagaan Res. 122, 60–74.
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
Tinjauan komprehensif kajian terbaru dengan UAV untuk pertanian ketepatan di kawasan terbuka dan rumah hijau. Appl. Sci. 12 (3), 1047. https://doi.org/10.3390/
app12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018). Fenotaip Medan untuk Masa Depan. Dalam Annual Plant Reviews dalam talian (ms. 719–736). John
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
Austin, R., 2010. Sistem Pesawat Tanpa Pemandu: Reka Bentuk, Pembangunan dan Penggunaan UAVS. Dalam: Sistem Pesawat Tanpa Awak: Reka Bentuk, Pembangunan dan UAVS
Kerahan. John Wiley dan Sons. https://doi.org/10.1002/9780470664797.
Awais, M., Li, W., Cheema, MJM, Zaman, QU, Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, AA, Afzal, MM, Liu, C., 2022. Penderiaan jauh berasaskan UAV dalam tekanan tumbuhan bayangkan menggunakan penderia haba resolusi tinggi untuk amalan pertanian digital: semakan meta. Int. J. Alam Sekitar. Sci. Technol. https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. Pertanian pintar: Peluang, cabaran
dan pemboleh teknologi. 2018 IoT Menegak dan. Sidang Kemuncak Topik Pertanian -Tuscany (IOT Tuscany) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. Pembelajaran mendalam dengan pelabelan data tanpa pengawasan untuk pengesanan rumpai dalam tanaman baris dalam imej UAV. Penderiaan Jauh 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. Proses konstruktivis normatif lawan sosial dalam peruntukan petikan: model analisis rangkaian. Am. sosiol. Wahyu 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. Penilaian kebolehubahan status air ladang anggur oleh haba dan multispektral
imejan menggunakan kenderaan udara tanpa pemandu (UAV). Pengairan. Sci. 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L.,Pembiakan generasi seterusnya. Sci tumbuhan. 242, 3–13. https://doi.org/10.1016/j.
plantsci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. Perspektif mengenai penggunaan sistem udara tanpa pemandu untuk memantau lembu. Outlook Agric. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. Berat rendah dan hiperspektral berasaskan UAV kamera bingkai penuh
untuk memantau tanaman: Perbandingan spektrum dengan ukuran spektroradiometer mudah alih. Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Penderiaan jauh udara dalam pertanian: Pendekatan praktikal untuk liputan kawasan
dan perancangan laluan untuk armada robot udara mini. J. Field Rob. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. Tinjauan tentang aplikasi algoritma perancangan laluan untuk UAV berbilang pemutar dalam ketepatan
pertanian. J. Navig. 75 (2), 364–383.
Basnet, B., Bang, J., 2018. Pertanian berintensif pengetahuan terkini: ulasan tentang sistem penderiaan gunaan dan analitik data. J. Sens. 2018, 1–13.
Bendig, J., Bolten, A., Bareth, G., 2013. Pengimejan berasaskan UAV untuk model permukaan tanaman berbilang temporal dengan resolusi sangat tinggi untuk memantau kebolehubahan pertumbuhan tanaman. Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. Menganggarkan biojisim barli menggunakan model permukaan tanaman (CSM) yang diperoleh daripada pengimejan RGB berasaskan UAV. Penderiaan Jauh 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. Menggabungkan ketinggian tumbuhan berasaskan UAV dari permukaan tanaman model,
indeks tumbuh-tumbuhan inframerah boleh dilihat dan berhampiran untuk pemantauan biojisim dalam barli. Int. J. Appl. Earth Obs. Geoinf. 39, 79–87. https://doi.org/10.1016/j.jag.2015.02.012.
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Fereres, E., Villalobos, F., 2009a. Memetakan konduktans kanopi dan CWSI di kebun zaitun menggunakan resolusi tinggi
imejan penderiaan jauh terma. Persekitaran Sens Jauh. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
Berni, JA, Zarco-Tejada, PJ, Suarez, ´ L., Fereres, E., 2009b. Penderiaan jauh berbilang spektrum terma dan jalur sempit untuk pemantauan tumbuh-tumbuhan daripada kenderaan udara tanpa pemandu. IEEE Trans. Geosci. Sens Jauh 47 (3), 722–738.
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. Internet Perkara dalam keselamatan makanan: Kajian literatur dan analisis bibliometrik. Trends Food Sci. Technol. 94,54–64. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT dalam pertanian: Mereka bentuk juruterbang berskala besar di seluruh Eropah. Komuniti IEEE. Mag. 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019. Penjejakan UAV berbilang sensor bagi anak benih individu dan komuniti anak benih pada ketepatan milimeter. Dron 3 (4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. Menilai imej berbilang spektrum dan indeks tumbuh-tumbuhan untuk aplikasi pertanian ketepatan daripada imej UAV. Penderiaan Jauh 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. Pemantauan penunjuk pertumbuhan bit gula menggunakan indeks tumbuh-tumbuhan julat dinamik lebar (WDRVI) yang diperoleh daripada UAV
imej berbilang spektrum. Pengiraan. Elektron. Agric. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007. Evolusi struktur intelektual kesusasteraan perniagaan keluarga: kajian bibliometrik FBR. Perniagaan Keluarga Rev. 20 (2), 141–162.
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. Pemantauan dinamik biojisim beras di bawah
rawatan nitrogen yang berbeza menggunakan UAV ringan dengan kamera syot kilat bingkai imej dwi. Kaedah Tumbuhan 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8.
Chamuah, A., Singh, R., 2019. Menjaga kemampanan dalam pertanian India melalui UAV awam: perspektif inovasi yang bertanggungjawab. SN Appl. Sci. 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. Tadbir urus bertanggungjawab bagi inovasi kenderaan udara tanpa pemandu (UAV) awam untuk aplikasi insurans tanaman India. J. Bertanggungjawab
Technol. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. Mengaplikasikan pengimejan udara saluran nampak resolusi tinggi bagi kanopi tanaman kepada pengurusan pengairan yang tepat. Agric. air
Manag. 216, 196–205. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. UAV ringan dengan fotogrametri on-board dan kedudukan GPS frekuensi tunggal untuk aplikasi metrologi. ISPRS J. Photogramm. Sens Jauh 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. Platform IoT berasaskan rantaian blok untuk pengurusan operasi dron autonomi. Dalam: Prosiding ACM ke-2
Bengkel MobiCom mengenai Komunikasi Tanpa Wayar Berbantukan Drone untuk 5G dan Seterusnya, ms 31–36. https://doi.org/10.1145/3414045.3415939.
Day, RA, Gastel, B., 1998. Bagaimana menulis dan menerbitkan karya ilmiah. Cambridge University Press. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´ J., Jim´enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. Pemetaan cynodon dactylon infesting tanaman penutup dengan prosedur OBIA pokok keputusan automatik dan imejan UAV untuk penanaman vitikultur ketepatan. Penderiaan Jauh 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S´ anchez, J., Pena, ˜ JM, Jim´enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018. Algoritma hutan rawak automatik-OBIA untuk pemetaan rumpai awal antara dan dalam baris tanaman menggunakan imejan UAV. Penderiaan Jauh 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. Pengukuran Automatik Ketinggian Tumbuhan Genotip Gandum Menggunakan DSM yang Diperoleh daripada Imejan UAV. Prosiding 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. Rangkaian pembahagian semantik ringan untuk pemetaan rumpai masa nyata menggunakan kenderaan udara tanpa pemandu. Appl. Sci. 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. Penderiaan jauh pelbagai spektrum berasaskan UAV untuk pertanian ketepatan: perbandingan antara kamera yang berbeza. ISPRS J. Photogramm. Sens Jauh 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. Pembelajaran mesin dan teknik penderiaan jauh digunakan untuk menganggar penunjuk tanah - semakan. Ecol. Ind. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. Imejan UAV bawaan udara resolusi tinggi untuk menilai parameter mahkota pokok zaitun menggunakan foto 3D
pembinaan semula: aplikasi dalam ujian pembiakan. Penderiaan Jauh 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, SK, 2021. Pengurusan kapasiti lapangan terbang: kajian semula dan analisis bibliometrik. J. Air Transp. Manag. 91, 102010.
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, B., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
Menggunakan imejan RapidEye untuk mengenal pasti kebolehubahan dalam bidang pertumbuhan tanaman dan hasil di Ontario, Kanada. Precision Agric. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
Dutta, PK, Mitra, S., 2021. Aplikasi dron pertanian dan iot untuk memahami rantaian bekalan makanan semasa pasca COVID-19. Dalam: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (Eds.), Informatik Pertanian: Automasi Menggunakan IoT dan Pembelajaran Mesin. Wiley, hlm. 67–87. van Eck, N., Waltman, L., 2009. Tinjauan perisian: VOSviewer, program komputer untuk pemetaan bibliometrik. Scientometrics 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindia, MN, 2018. Gambaran keseluruhan Internet of Things (IoT) dan analitik data dalam pertanian: faedah dan cabaran.
Perkara Internet IEEE J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J.,Maeda, M., Chavez, JC, 2019. Pengesahan agronomik UAV dan medan
ukuran untuk jenis tomato. Pengiraan. Elektron. Agric. 158, 278–283. https:// doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. Penilaian tekanan air berasaskan penderiaan jauh berbilang spektrum resolusi tinggi dan terma dalam
pokok anggur yang diairi bawah permukaan. Penderiaan Jauh 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. Menggunakan penderiaan jauh hiperspektral untuk penggredan tanah. Penderiaan Jauh 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312.
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., Anderson, K., 2020. Penilaian pelbagai skala pemantulan permukaan berbilang spektrum berasaskan dron dan indeks tumbuh-tumbuhan dalam keadaan operasi. Penderiaan Jauh 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019. Kajian teknologi komunikasi wayarles pada Internet Perkara untuk pertanian ketepatan. Pers Tanpa Wayar. Commun. 108 (3),
1785-1802.
Ferreira, MP, Pinto, CF, Serra, FR, 2014. Teori kos transaksi dalam penyelidikan perniagaan antarabangsa: kajian bibliometrik selama tiga dekad. Scientometrics 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
Fisher, P., Abuzar, M., Rab, M., Best, F., Chandra, S., 2009. Kemajuan dalam pertanian ketepatan di tenggara Australia. I. metodologi regresi untuk mensimulasikan
variasi spatial dalam hasil bijirin menggunakan hasil paddock bersejarah petani dan indeks tumbuhan perbezaan normal. Sci Padang Rumput Tanaman. 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015. Sains, teknologi dan masa depan dron autonomi kecil. Alam 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. Internet perkara untuk masa depan pertanian pintar: tinjauan komprehensif tentang teknologi baru muncul. IEEE CAA J. Autom. Sinica 8 (4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. Pembahagian tumbuhan ara daripada imej udara menggunakan rangkaian pengekod-penyahkod konvolusi yang mendalam. Penderiaan Jauh 11 (10), 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. Cabaran UAV untuk menilai tekanan air untuk
pertanian lestari. Agric. Manag Air. 153, 9–19. https://doi.org/10.1016/j. agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ andez, A., Guti´errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur´ an-Zuazo, VH, 2018. Pengimejan terma di loji
tahap untuk menilai status tanaman-air dalam pokok badam (cv. Guara) di bawah strategi pengairan defisit. Agric. Manag Air. 208, 176–186. https://doi.org/10.1016/j.
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. Pemantulan permukaan dan pengukuran spektroskopi pendarfluor teraruh matahari menggunakan UAS hiperspektral kecil. Penderiaan Jauh 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇ sparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. Kaedah automatik untuk
pemetaan rumpai di ladang oat berdasarkan imejan UAV. Pengiraan. Elektron. Agric.
Gebbers, R., Adamchuk, VI, 2010. Pertanian ketepatan dan keselamatan makanan. Sains 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. Gabungan pemodelan spektrum dan spatial hasil jagung berdasarkan imej udara dan model permukaan tanaman yang diperoleh dengan sistem pesawat tanpa pemandu. Penderiaan Jauh 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. Reka bentuk mampan untuk pengguna: kajian literatur dan analisis bibliometrik. alam sekitar. Sci. mencemarkan. Res. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. Penjanaan permukaan tindak balas spektraltemporal dengan menggabungkan satelit berbilang spektrum dan hiperspektral
Imejan UAV untuk aplikasi pertanian ketepatan. IEEE J. Sel. Atas. Appl. Earth Obs. Sens Jauh 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. Pertanian berasaskan IoT sebagai awan dan perkhidmatan data besar: permulaan India digital. J. Org. dan Pengiraan Pengguna Akhir. (JOEUC) 29 (4),
1-23.
Gmür, M., 2006. Analisis petikan bersama dan pencarian kolej yang tidak kelihatan: penilaian metodologi. Scientometrics 57 (1), 27–57. https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. Kiraan digital tumbuhan jagung oleh Kenderaan Udara Tanpa Pemandu (UAV). Penderiaan Jauh 9 (6). Https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. Kenderaan udara tanpa pemandu sayap Rotary untuk pengawasan rumpai akuatik dan
pengurusan. J. Intell. Sistem Robotik: Teori. Appl. 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´ on, ´ D., De Castro, AI, Lopez-Granados, ´ F., 2014. Menilai ketepatan mozek daripada imejan kenderaan udara tanpa pemandu (UAV) untuk tujuan pertanian ketepatan dalam gandum. tepat. Agric. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´ on, ´ D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. Fenotaip medan tegasan air pada skala pokok oleh imejan penderiaan UAV : pandangan baharu untuk
pemerolehan haba dan penentukuran. tepat. Agric. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. Kebolehgunaan dan batasan menggunakan indeks tegasan air tanaman sebagai penunjuk defisit air dalam kebun sitrus. Agric. Untuk. Meteorol. 198–199, 94–104. https://doi.org/10.1016/j. agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. Menggunakan imejan haba UAV resolusi tinggi untuk
menilai kebolehubahan dalam status air lima spesies pokok buah-buahan dalam dusun komersial. tepat. Agric. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
Goyal, K., Kumar, S., 2021. Celik kewangan: Kajian sistematik dan analisis bibliometrik. Int. J. Kajian Pengguna 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. Potensi fotogrametrik uav kos rendah dalam perhutanan dan pertanian. Arkib Antarabangsa Fotogrametri, Penderiaan Jauh dan Sains Maklumat Spatial – Arkib ISPRS 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R., Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. Menilai korelasi resolusi tinggi
NDVI dengan tahap penggunaan baja dan hasil tanaman padi dan gandum menggunakan UAV kecil. Penderiaan Jauh 11 (2), 112.
Gundolf, K., Filser, M., 2013. Penyelidikan pengurusan dan agama: analisis petikan. J. Bas. Etika 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. Simulasi CFD dan pengesahan eksperimen spatial dan pengagihan temporal
aliran udara downwash UAV pertanian quad-rotor dalam hover. Pengiraan. Elektron. Agric. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
Haghighattalab, A., Gonz´ alez P´erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , Poland, J., 2016.
Aplikasi sistem udara tanpa pemandu untuk fenotaip pemprosesan tinggi bagi tapak semaian pembiakan gandum yang besar. Kaedah Tumbuhan 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. Pengimejan spektrum daripada UAV di bawah keadaan pencahayaan yang berbeza-beza . Dalam GG Bill R. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 40, Issue 1W2, ms. 189–194). Persatuan Antarabangsa untuk Fotogrametri dan Penderiaan Jauh. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L.Menilai teknik untuk memetakan tumbuh-tumbuhan pulau daripada udara tanpa pemandu
imej kenderaan (UAV): Pengelasan piksel, tafsiran visual dan pendekatan pembelajaran mesin. Int. J. Appl. Earth Obs. Geoinf. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. Pertanian pintar melalui kepimpinan yang bertanggungjawab di bangladesh: kemungkinan, peluang dan seterusnya.
Kelestarian 13 (8), 4511.
Hardin, PJ, Hardin, TJ, 2010. Kenderaan pandu jauh berskala kecil dalam penyelidikan alam sekitar. Kompas Geografi 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
Hardin, PJ, Jensen, RR, 2011. Kenderaan udara tanpa pemandu berskala kecil dalam penderiaan jauh alam sekitar: cabaran dan peluang. GISci. Sens Jauh 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. Internet of Things Pertanian: teknologi dan aplikasi, (1st ed. 2021 edition). Springer.
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, 2004.
Pengimejan dari kenderaan udara tanpa pemandu: pengawasan pertanian dan sokongan keputusan. Pengiraan. Elektron. Agric. 44 (1), 49–61. https://doi.org/10.1016/j.
kompag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, Fenotaip medan throughput tinggi ketinggian tumbuhan gandum dan kadar pertumbuhan dalam percubaan plot medan menggunakan penderiaan jauh berasaskan UAV. Penderiaan Jauh 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. Pemprosesan dan penilaian spektrometri, imejan stereoskopik yang dikumpul menggunakan kamera spektrum UAV ringan untuk pertanian ketepatan. Penderiaan Jauh 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. Perkhidmatan internet perkara berasaskan kenderaan tanpa pemandu berketinggian rendah: tinjauan komprehensif dan perspektif masa depan. Perkara Internet IEEE J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. Gabungan aliran optik dan navigasi berasaskan stereo bagi ngarai bandar untuk UAV. Dalam: 2005 IEEE/RSJ
Persidangan Antarabangsa mengenai Robot dan Sistem Pintar, hlm. 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. Platform pertanian IoT Kreatif untuk pengkomputeran kabus awan. Sustain. Pengiraan. Inf. Syst. 28, 100285.
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. Rangkaian konvolusi sepenuhnya untuk pemetaan rumpai kenderaan udara tanpa pemandu ( imejan UAV). PLoS ONE 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. Pembelajaran mendalam berbanding Analisis Imej Berasaskan Objek (OBIA) dalam pemetaan rumpai imejan UAV. Int. J.
Sens Jauh 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. Penentukuran warna dalam untuk imejan UAV dalam pemantauan tanaman
menggunakan pemindahan gaya semantik dengan perhatian tempatan kepada global. Int. J. Appl. Earth Obs. Geoinf. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. Pembangunan dan prospek teknologi kenderaan udara tanpa pemandu untuk pengeluaran pertanian
pengurusan. Int. J. Agric. biol. En. 6 (3), 1–10. https://doi.org/10.3965/j. ijabe.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. Pembangunan sistem semburan untuk platform kenderaan udara tanpa pemandu. Appl. En. Agric. 25 (6), 803–809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. Pemerolehan gambar digital NIR-hijau-biru daripada
pesawat tanpa pemandu untuk pemantauan tanaman. Penderiaan Jauh 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. Penderiaan jauh berasaskan satelit dan dron bagi tanaman dan tanah untuk pertanian pintar–semakan. Sci Tanah. Nutr Tumbuhan. 66 (6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. Kajian semula aplikasi dan teknologi komunikasi untuk Internet of Things (IoT) dan
Pertanian pintar mampan berasaskan Kenderaan Udara Tanpa pemandu (UAV). Kelestarian 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. Menilai ketepatan model permukaan digital resolusi tinggi yang dikira oleh
PhotoScan® dan MicMac® dalam keadaan tinjauan sub-optimum. Penderiaan Jauh 8 (6), https://doi.org/10.3390/rs8060465.
Jim´enez-Brenes, FM, Lopez-Granados, ´ F., Castro, AI, Torres-S´ anchez, J., Serrano, N., Pena, ˜ JM, 2017. Mengukur impak pemangkasan pada seni bina pokok zaitun dan tahunan pertumbuhan kanopi dengan menggunakan pemodelan 3D berasaskan UAV. Kaedah Tumbuhan 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl´e, M., Comar, A., 2017. Anggaran ketumpatan tumbuhan tanaman gandum pada kemunculan daripada imejan UAV altitud sangat rendah. Sens Jauh.
alam sekitar. 198, 105–114. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. Sistem pemantauan produk pertanian yang disokong oleh pengkomputeran awan. Pengiraan Kluster. 22 (4), 8929–8938.
Ju, C., & Anak, HI 2018a. Penilaian prestasi berbilang sistem UAV untuk penderiaan jauh dalam pertanian. Prosiding Bengkel mengenai Visi dan Tindakan Robotik dalam Pertanian di Persidangan Antarabangsa Robotik dan Automasi (ICRA) IEEE, Brisbane, Australia, 21–26.
Ju, C., Anak, HI, 2018b. Sistem UAV berbilang untuk aplikasi pertanian: kawalan, pelaksanaan dan penilaian. Elektronik 7 (9), 162. https://doi.org/10.3390/
elektronik7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. Potensi penderiaan jauh dan kecerdasan buatan sebagai alat untuk meningkatkan
daya tahan sistem pengeluaran pertanian. Curr. Pendapat. Bioteknol. 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. , 2019. Teknik pengakap tanaman yang dipertingkatkan yang menggabungkan pengimejan tanaman berbilang spektrum bantuan kenderaan udara tanpa pemandu ke dalam amalan pengakap konvensional untuk hawar batang bergetah dalam tembikai. Tumbuhan Dis. 103 (7), 1642–1650.
Kapoor, KK, Tamilmani, K., Rana, NP, Patil, P., Dwivedi, YK, Nerur, S., 2018. Kemajuan dalam penyelidikan media sosial: masa lalu, sekarang dan masa depan. Maklumkan. Syst. Depan. 20
(3), 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: rangkaian pengesanan penyakit anggur berdasarkan imej berbilang spektrum dan peta kedalaman. Penderiaan Jauh 12 (20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. Perbandingan imejan berbilang spektrum berasaskan satelit dan UAV untuk ladang anggur
penilaian kebolehubahan. Penderiaan Jauh 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020. Sistem asal dioptimumkan rantaian blok IoT untuk industri makanan 4.0 menggunakan pembelajaran mendalam lanjutan. Penderia 20 (10), 2990.
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. Pengesanan penyakit tumbuhan berasaskan imej: daripada pembelajaran mesin klasik kepada perjalanan pembelajaran mendalam. Komuniti Tanpa Wayar. Komputer Mudah Alih. 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. Rangka kerja separa penyeliaan novel untuk klasifikasi tanaman/rumpai berasaskan UAV. PLoS ONE 16 (5), e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. Gambaran keseluruhan aplikasi semasa dan potensi penderiaan jauh terma dalam pertanian ketepatan. Pengiraan. Elektron.
Agric. 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019. Evolusi Internet Perkara (IoT) dan kesannya yang ketara dalam bidang Pertanian Ketepatan. Pengiraan. Elektron. Agric. 157, 218–231.
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. Penglibatan pekerja untuk organisasi mampan: analisis kata kunci menggunakan analisis rangkaian sosial dan pecah
pendekatan pengesanan. Kelestarian 8 (7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. Integrasi daratan dan bawaan dron
kaedah penderiaan hiperspektral dan fotogrametrik untuk pemetaan penerokaan dan pemantauan perlombongan. Penderiaan Jauh 10 (9), 1366. https://doi.org/10.3390/
rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. Pengiraan tanaman jagung menggunakan pembelajaran mendalam dan imej UAV. IEEE Geosci. Sens Jauh Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. Pembelajaran mesin automatik untuk fenotaip tumbuhan berasaskan imej throughput tinggi. Penderiaan Jauh 13 (5), 858. https://
doi.org/10.3390/rs13050858.
Kovalev, IV, Voroshilova, AA, 2020. Trend teknologi moden dalam pembangunan ekosistem UAV kargo. J. Fizik. Conf. Ser. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. Visual SLAM untuk ternakan dalaman dan pertanian menggunakan dron kecil dengan kamera monokular: kajian kebolehlaksanaan.
Drone 5 (2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie´c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. Tinjauan dron untuk automasi pertanian dari menanam ke
menuai. Dalam: INES 2018 – Persidangan Antarabangsa IEEE ke-22 mengenai Sistem Kejuruteraan Pintar, ms. 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. Pandangan dan cabaran rangka kerja UAV IoT: ke arah melindungi dron sebagai "Perkara". Penderia 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. Pemprosesan imej dan prosedur klasifikasi untuk analisis imejan sub-desimeter yang diperoleh dengan pesawat tanpa pemandu di atas gersang
banjaran. GISci. Sens Jauh 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. Kenderaan udara tanpa pemandu untuk pemetaan dan pemantauan rangeland: perbandingan dua sistem. Prosiding Persidangan Tahunan ASPRS.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. Aliran kerja sumber terbuka untuk pemetaan rumpai di padang rumput asli
menggunakan kenderaan udara tanpa pemandu: Menggunakan Rumex obtusifolius sebagai kajian kes. Eur. J.Remote Sens. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. Penerimaan pakai, keuntungan, dan penggunaan data pertanian ketepatan yang lebih baik.
Kertas kerja. Universiti Purdue. https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb´e, S., Baret, F., 2008. Penilaian imejan kenderaan udara tanpa pemandu untuk pemantauan kuantitatif tanaman gandum dalam plot kecil. Penderia 8 (5), 3557–3585. https://doi.org/10.3390/s8053557.
Li, C., Niu, B., 2020. Reka bentuk pertanian pintar berdasarkan data besar dan Internet perkara. Int. J. Pengagihan. Sens. Netw. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. Anggaran jauh ketinggian kanopi dan biojisim jagung di atas tanah menggunakan imej stereo resolusi tinggi daripada sistem kenderaan udara tanpa pemandu kos rendah. Ecol. Ind. 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. Pembelajaran mesin dalam pertanian: ulasan. Penderia 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. Jauh, fenotaip udara bagi sifat jagung dengan pendekatan berbilang penderia mudah alih. Kaedah Tumbuhan 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. Pengesanan dan pengiraan panik sorgum menggunakan imej sistem udara tanpa pemandu dan pembelajaran mendalam. Depan. Sci tumbuhan. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. Sistem pemantauan Internet of Things eko pertanian moden berdasarkan pengkomputeran awan. Akses IEEE 7, 37050–37058.
Lopez-Granados, ´ F., 2011. Pengesanan rumpai untuk pengurusan rumpai khusus tapak: pemetaan dan pendekatan masa nyata. Rumpai Res. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
Lopez-Granados, ´ F., Torres-Sanchez, ´ J., De Castro, A.-I., Serrano-P´erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. Pemantauan awal berasaskan objek terhadap rumpai rumput dalam tanaman rumput menggunakan imejan UAV resolusi tinggi. Agron. Sustain. Dev. 36 (4), 1–12
Lopez-Granados, ´ F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016. Pemetaan rumpai musim awal dalam bunga matahari menggunakan teknologi UAV: kebolehubahan peta rawatan herbisida terhadap ambang rumpai. tepat. Agric. 17 (2), 183–199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS – spektroskopi pengimejan daripada sistem pesawat tanpa pemandu multirotor. J. Field Rob. 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Kleemola, J., 2008. Pengimbasan laser daratan tanaman pertanian. Dalam JJ
Chen J. Maas H–G. (Ed.), Arkib Antarabangsa Fotogrametri, Penderiaan Jauh dan Sains Maklumat Spatial—Arkib ISPRS (Jilid 37, ms. 563–566).
Persatuan Antarabangsa untuk Fotogrametri dan Penderiaan Jauh. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. Kajian semula klasifikasi imej penutup tanah berasaskan objek diselia. ISPRS J. Photogramm. Sens Jauh 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019. Perspektif untuk penderiaan jauh dengan kenderaan udara tanpa pemandu dalam pertanian ketepatan. Trends Plant Sci. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017.
Fenotaip berasaskan sistem udara tanpa pemandu (UAS) kacang soya menggunakan gabungan data berbilang sensor dan mesin pembelajaran ekstrem. ISPRS J. Photogramm. Sens Jauh 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020.
Pemantauan tanaman menggunakan gabungan data satelit/UAV dan pembelajaran mesin. Penderiaan Jauh 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Malta, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P´erez, G., Su, Z., Vico, G., Toth , B., 2018. Mengenai penggunaan sistem udara tanpa pemandu untuk
pemantauan alam sekitar. Penderiaan Jauh 10 (4), 641.
Marinko, RA, 1998. Petikan kepada jurnal pengajian wanita dalam disertasi, 1989 dan Pustakawan Bersiri 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. Pengurusan sumber dalam rangkaian wayarles berbantukan UAV: perspektif pengoptimuman. Rangkaian Ad Hoc. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. Aplikasi praktikal platform UAV multisensor berdasarkan imej resolusi tinggi berbilang spektrum, haba dan RGB dalam ketepatan
penanaman anggur. Pertanian 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. Di luar indeks NDVI tradisional sebagai faktor utama untuk mengarusperdanakan penggunaan UAV dalam vitikultur ketepatan. Sci. Rep. 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 . Perbandingan UAV, pesawat
dan platform penderiaan jauh satelit untuk vitikultur ketepatan. Penderiaan Jauh 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. Penapisan UAV dan pembelajaran mesin bagi indeks tumbuh-tumbuhan dipacu satelit untuk ketepatan
pertanian. Penderia 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990. Memetakan pengarang dalam ruang intelek: gambaran keseluruhan teknikal. J. Am. Soc. info. Sci. 41 (6), 433–443.
Meinen, BU, Robinson, DT, 2021. Pemodelan hakisan pertanian: menilai anggaran hakisan skala medan USLE dan WEPP menggunakan data siri masa UAV. alam sekitar. Modell. Perisian 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. Klasifikasi komuniti padang rumput asli tanah rendah menggunakan Imejan Sistem Pesawat Tanpa Awak (UAS) hiperspektral dalam
Tanah tengah Tasmania. Dron 3 (1), 5.
Messina, G., Modica, G., 2020. Aplikasi imej terma UAV dalam pertanian ketepatan: keadaan seni dan tinjauan penyelidikan masa depan. Penderiaan Jauh 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. Kajian bibliografi tentang data besar: konsep, trend dan cabaran. Pengurusan Proses Perniagaan. J. 23 (3),
555-573.
Mochida, K., Saisho, D., Hirayama, T., 2015. Penambahbaikan tanaman menggunakan set data kitaran hayat yang diperoleh di bawah keadaan lapangan. Depan. Sci tumbuhan. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, BBVL, 2018. Semakan tentang aplikasi sistem dron dalam pertanian ketepatan. Pengiraan Procedia. Sci. 133, 502–509.
Moharana, S., Dutta, S., 2016. Kebolehubahan spatial kandungan klorofil dan nitrogen beras daripada imejan hiperspektral. ISPRS J. Photogramm. Sens Jauh 122, 17–29.
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
Nillaor, P., 2019. IoT dan analisis data pertanian untuk ladang pintar. Pengiraan. Elektron. Agric. 156, 467–474.
Nansen, C., Elliott, N., 2016. Penderiaan jauh dan pemprofilan pantulan dalam entomologi. Annu. Rev. Entomol. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. Pemetaan pelbagai spektrum dalam pertanian: mozek rupa bumi menggunakan UAV quadcopter autonomi. Int. Conf.
Sistem Pesawat Tanpa Awak. (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. Internet perkara dron (Iodt): bayangan masa depan dron pintar. Adv. Intell. Syst. Pengiraan. 1045, 563–580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. Penderia berbilang spektrum ringan untuk mikro UAV—peluang untuk penderiaan jauh bawaan udara resolusi sangat tinggi. Int. Gerbang. Fotogram. Sens Jauh Spat. Inf. Sci 37 (B1), 1193–1200.
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. Aplikasi UAV yang muncul dalam pertanian. Dalam: 2019 Persidangan Antarabangsa ke-7 mengenai Teknologi Perisikan Robot dan
Aplikasi (RiTA), ms 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
Nerur, SP, Rasheed, AA, Natarajan, V., 2008. Struktur intelektual bidang pengurusan strategik: analisis rujukan bersama pengarang. Strategi. Manag. J. 29 (3),
319-336.
Neupane, K., Baysal-Gurel, F., 2021. Pengenalpastian automatik dan pemantauan penyakit tumbuhan menggunakan kenderaan udara tanpa pemandu: ulasan. Penderiaan Jauh 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV untuk aplikasi pemetaan 3D: ulasan. Appl. Geomatik 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. Anggaran penyejatan dengan UAV kecil dalam pertanian ketepatan. Penderia 20 (22), 6427. https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Bibliometrik, Analisis Petikan dan Analisis Petikan Bersama. Tinjauan Kesusasteraan I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, penderia dan pemprosesan data dalam agroforestry: tinjauan ke arah aplikasi praktikal. Int. J. Remote Sens. 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
Panday, AS, Pratihast, AK, Aryal, J., Kayastha, RB, 2020. Kajian tentang penyelesaian data berasaskan dron untuk tanaman bijirin. Drone 4 (3), 1–29. https://doi.org/10.3390/
dron4030041.
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. Menganggar kandungan minyak dan protein biji bijan menggunakan pemprosesan imej dan rangkaian saraf tiruan. J. Am. Minyak
Ahli Kimia Soc. 97 (7), 691–702.
Pena, ˜ JM, Torres-S´anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., Pemetaan rumpai dalam ladang jagung awal musim menggunakan analisis berasaskan objek daripada
Gambar kenderaan udara tanpa pemandu (UAV). PLoS ONE 8 (10), e77151.
P´erez-Ortiz, M., Pena, ˜ JM, Guti´errez, PA, Torres-S´ anchez, J., Herv´ as-Martínez, C.,
Lopez-Granados, ´ F., 2015. Sistem separa diselia untuk pemetaan rumpai dalam tanaman bunga matahari menggunakan kenderaan udara tanpa pemandu dan kaedah pengesanan baris tanaman. Appl. Komputer Lembut. J. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. Peranti IoT yang kos efektif sebagai sumber data yang boleh dipercayai untuk sistem pengurusan air berasaskan blokchain dalam pertanian ketepatan. Pengiraan. Elektron. Agric. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. Sistem UAV–WSN lanjutan untuk pemantauan pintar dalam pertanian ketepatan. Penderia 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. Aplikasi rantaian blok dalam rantaian bekalan, pengangkutan dan logistik: tinjauan sistematik literatur. Int. J. Prod. Res. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. Kenderaan udara tanpa pemandu yang fleksibel untuk pertanian ketepatan.
tepat. Agric. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
Pritchard, A., 1969. Bibliografi statistik atau bibliometrik. J. Dokumen. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. Kesesuaian kenderaan udara tanpa pemandu (UAV) untuk penilaian ladang dan tanaman eksperimen. Pertanian 99 (4), 431–436.
Puri, V., Nayyar, A., Raja, L., 2017. Drone pertanian: satu kejayaan moden dalam pertanian ketepatan. J. Statistik. Manag. Syst. 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. Kompilasi aplikasi UAV untuk pertanian ketepatan. Pengiraan. Netw. 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. Aplikasi analisis data besar dan kecerdasan buatan dalam penyelidikan agronomik. India J. Agron. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. Analisis bibliometrik mengenai penggunaan kenderaan udara tanpa pemandu dalam kajian pertanian dan perhutanan. Int. J. Remote Sens. 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013.
Potensi penggunaan sistem pesawat tanpa pemandu kecil (UAS) dalam penyelidikan rumpai. Rumpai Res. 53 (4), 242–248.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., Adakah indeks tumbuh-tumbuhan diperoleh daripada kamera gred pengguna yang dipasang pada
UAV cukup dipercayai untuk menilai plot eksperimen? Eur. J. Agron. 74, 75–92. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. Pendigitalan dalam rantaian bekalan makanan: kajian bibliometrik dan laluan utama laluan utama
analisis. Kelestarian 14 (1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. Dron untuk pengurusan rantaian bekalan dan logistik: agenda kajian dan penyelidikan. Int. J. Logis. Res. Appl.
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. Teknologi blockchain dalam pengurusan logistik dan rantaian bekalan: kajian bibliometrik. Logistik 5 (4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. Drone kemanusiaan: agenda kajian dan penyelidikan. Internet Perkara 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. Penyelidikan blockchain dalam penjagaan kesihatan: kajian bibliometrik dan trend penyelidikan semasa. J. Data, Inf. dan
Manag. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. Penyelidikan Internet Perkara dalam pengurusan rantaian bekalan dan logistik: analisis bibliometrik. Internet
Perkara 12, 100318.
ReportLinker, 2021. Pasaran Dron Pertanian Global Mencecah AS$15.2 Bilion Menjelang Tahun Bilik Berita GlobeNewswire. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/ms/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- Tahun-2027.html.
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. Penentukuran kamera terma tidak sejuk dan pengoptimuman
proses fotogrametri untuk aplikasi UAV dalam pertanian. Penderia (Switzerland) 17 (10). https://doi.org/10.3390/s17102173.
Rivera, MA, Pizam, A., 2015. Kemajuan dalam penyelidikan hospitaliti: "Dari Rodney Dangerfield kepada Aretha Franklin". Int. J. Kontempor. Hospital. Manag. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. Sistem deria berasaskan UAV mini untuk mengukur pembolehubah persekitaran di rumah hijau. Penderia 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. UAV gred pengguna digunakan untuk mengesan dan menganalisis corak pengedaran spatial rumpai lewat musim dalam ladang bawang komersial. tepat. Agric. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. Tanpa pemandu sistem kamera spektrum kendalian kenderaan udara (UAV) untuk aplikasi hutan dan pertanian. Teruskan. SPIE – Int. Soc. opt. En. 8174 https://doi.org/10.1117/12.897585.
Sah, B., Gupta, R., Bani-Hani, D., 2021. Analisis halangan untuk melaksanakan logistik dron. Int. J. Logis. Res. Appl. 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, SP, & Saha, HN, dron berasaskan IOT untuk peningkatan kualiti tanaman dalam bidang pertanian. Dalam SH
N. Chakrabarti S. (Ed.), 2018 IEEE 8th Annual Computing and Communication Workshop and Conference, CCWC 2018 (Vols. 2018-Januari, ms. 612–615). Institut
of Electrical and Electronics Engineers Inc. doi: 10.1109/CCWC.2018.8301662.
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019. LEDCOM: komunikasi berasaskan LED yang baru dan cekap untuk pertanian ketepatan. Konf. IEEE info. Commun. Technol. 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
Salamí, E., Barrado, C., Pastor, E., 2014. Eksperimen penerbangan UAV digunakan pada penderiaan jauh kawasan tumbuh-tumbuhan. Penderiaan Jauh 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015.
Sistem pengimejan udara beraltitud rendah dan beresolusi tinggi untuk fenotaip tanaman baris dan padang: ulasan. Eur. J. Agron. 70, 112–123. https://doi.org/10.1016/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. Pengimejan terma berasaskan UAV resolusi tinggi untuk menganggarkan
kebolehubahan serta-merta dan bermusim status air tumbuhan dalam ladang anggur. Agric. Manag Air. 183, 49–59. https://doi.org/10.1016/j.agwat.2016.08.026.
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. Di luar analisis petikan: Model untuk penilaian kesan penyelidikan. J. Med. Perpustakaan Prof. : JMLA 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. Spektroskopi pengimejan berkaitan sains sistem bumi—suatu penilaian. Persekitaran Sens Jauh. 113, S123–S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. Memantau parameter agronomik tanaman gandum musim sejuk dengan UAV kos rendah
imejan. Penderiaan Jauh 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. Pembangunan dan penggunaan kenderaan udara tanpa pemandu autonomi untuk pensampelan aerobiologi yang tepat di atas
bidang pertanian. J. Field Rob. 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
Shadrin, D., Menshchikov, A., Somov, A., Bornemann, G., Hauslage, J., Fedorov, M.,
Mendayakan pertanian ketepatan melalui penderiaan terbenam dengan kecerdasan buatan. IEEE Trans. Instrumen. Meas. 69 (7), 4103–4113.
Shakhatreh, H., Sawalmeh, AH, Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Unmanned Aerial Vehicles (UAV): tinjauan tentang aplikasi awam dan cabaran penyelidikan utama. Akses IEEE 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. Pertanian dipacu data besar: analisis data besar dalam pembiakan tumbuhan, genomik dan penggunaan penderiaan jauh
teknologi untuk memajukan produktiviti tanaman. Fenomena Tumbuhan J. 2 (1), 1–8.
Sharma, BK, Chandra, G., Mishra, VP, 2019. Analisis Perbandingan dan Implikasi UAV dan AI dalam Penyiasatan Forensik. Dalam: Prosiding – 2019 Amity International
Persidangan mengenai Kepintaran Buatan. https://doi.org/10.1109/AICAI.2019.8701407.
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022. Peranan kecerdasan buatan dalam pengurusan rantaian bekalan: pemetaan wilayah. Int. J.
Prod. Res. 1–24. https://doi.org/10.1080/00207543.2022.2029611.
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan , MV,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A., McCutchen, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. Kenderaan udara tanpa pemandu untuk fenotaip pemprosesan tinggi dan penyelidikan agronomik. PLoS SATU
11 (7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. Menangkap kepelbagaian dirian jagung merentas zon kestabilan hasil menggunakan Udara Tanpa Pemandu
Kenderaan (UAV). Penderia 19 (20), 4446. https://doi.org/10.3390/s19204446.
Small, H., 1973. Petikan bersama dalam kesusasteraan saintifik: ukuran baru hubungan antara dua dokumen. J. Am. Soc. info. Sci. 24 (4), 265–269.
Small, H., Rorvig, ME, Lunin, LF, 1999. Visualisasi sains dengan pemetaan petikan. J. Am. Soc. info. Sci. 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. Lembu mengira di alam liar dengan imej udara yang digelokasikan di kawasan padang rumput yang besar. Pengiraan. Elektron. Agric. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
Srivastava, K., Pandey, PC, Sharma, JK, 2020. Pendekatan untuk pengoptimuman laluan dalam aplikasi pertanian ketepatan menggunakan UAV. Drone 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
Stafford, JV, 2000. Melaksanakan pertanian ketepatan pada abad ke-21. J. Agric. En. Res. 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. Penilaian kemarau gandum oleh imejan penderiaan jauh menggunakan kenderaan udara tanpa pemandu. Pada 2018 Persidangan Kawalan Cina (CCC) ke-37.
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018. Pemantauan karat kuning gandum dengan belajar daripada imejan udara UAV berbilang spektrum.
Pengiraan. Elektron. Agric. 155, 157–166. https://doi.org/10.1016/j. kompag.2018.10.017.
Su, Y., Wang, X., 2021. Inovasi pengurusan ekonomi pertanian dalam proses membina pertanian pintar oleh data besar. Pengkomputeran Mampan. Inf. Syst. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. Menilai sensitiviti sistem udara inframerah terma tanpa pemandu untuk mengesan tekanan air dalam kanopi kapas. Trans. ASABE 50 (6), 1955–1962.
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. Penyepaduan indeks tumbuh-tumbuhan berasaskan RGB, model permukaan tanaman dan pendekatan analisis imej berasaskan objek untuk anggaran hasil tebu menggunakan kenderaan udara tanpa pemandu. Pengiraan. Elektron. Agric. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. Sistem pemetaan hiperspektral ringan untuk
kenderaan udara tanpa pemandu—hasil pertama. Dalam: 2013 Bengkel Ke-5 mengenai Imej Hiperspektral dan Pemprosesan Isyarat: Evolusi dalam Penderiaan Jauh (WHISPERS), ms 1–4. https://doi.org/10.1109/WHISPERS.2013.8080721.
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014. Hiperspektral ringan
sistem pemetaan dan rantai pemprosesan fotogrametrik untuk kenderaan udara tanpa pemandu. Penderiaan Jauh 6 (11), 11013–11030. https://doi.org/10.3390/
rs61111013.
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. Strategi kawalan lanjutan menggunakan pemprosesan imej, UAV dan AI dalam pertanian: Kajian semula. Dunia J. Eng. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. Pemprosesan maklumat menggunakan petikan untuk menyiasat pengaruh jurnal dalam perakaunan. Inf. Proses. Mengurus. 34 (2–3), 341–359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. Tinjauan tentang rangkaian 5G dan kesannya terhadap pertanian: cabaran dan peluang. Pengiraan.
Elektron. Agric. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. Pembuatan keputusan berasaskan data dalam pertanian ketepatan: peningkatan data besar dalam sistem pertanian. J. Agric. Info Makanan.
20 (4), 344-380.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. Anggaran hasil dan ketinggian tumbuhan gandum musim sejuk menggunakan UAV- imej hiperspektral berasaskan.
Penderia 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. Persampelan aerobiologi yang diselaraskan bagi patogen tumbuhan di atmosfera bawah menggunakan dua kenderaan udara tanpa pemandu autonomi. J. Field Rob. 27 (3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. Pengesanan dan pengelasan perosak kacang soya menggunakan pembelajaran mendalam
dengan imej UAV. Pengiraan. Elektron. Agric. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. Penggunaan Uas untuk Menilai Sistem Pertanian di AN Wetland di Tanzania dalam— Dan WetSeason untuk Pertanian Lestari dan Menyediakan Kebenaran Tanah untuk Data Terra-Sar X. Dalam: ISPRS – Arkib Antarabangsa Fotogrametri, Penderiaan Jauh dan Sains Maklumat Spatial, ms 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall, M., 2008. Bibliometrics to webometrics. J. Maklumat. Sci. 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. Kaedah berasaskan objek automatik untuk ambang optimum dalam imej UAV: aplikasi untuk pengesanan tumbuh-tumbuhan dalam tanaman herba. Pengiraan. Elektron. Agric. 114, 43–52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. Pemantauan 3-D throughput tinggi ladang pokok pertanian dengan Teknologi Kenderaan Udara Tanpa pemandu (UAV). PLoS ONE 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´ F., 2014. Pemetaan berbilang masa bagi pecahan tumbuh-tumbuhan di ladang gandum awal musim menggunakan imej daripada UAV. Pengiraan. Elektron. Agric. 103, 104–113. https://doi.org/10.1016/j. kompag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. Kajian semula mengenai aplikasi berasaskan UAV untuk pertanian ketepatan. Maklumat (Switzerland) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. Mengoptimumkan perancangan penerbangan dron untuk mengukur struktur tanaman pokok hortikultur. ISPRS J. Photogramm.
Sens Jauh 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. Internet Perkara dalam pertanian, kemajuan terkini dan cabaran masa depan. Biosis. En. 164, 31–48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. Pemetaan saintifik penyelidikan sains komputer di Mexico. Scientometrics 105 (1), 97–114.
UN., 2019. Prospek penduduk dunia 2019. https://population.un.org/wpp/ (Diakses pada 15/04/2022).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. Pencirian sawah padi oleh sistem penderia hiperspektral miniatur dipasang UAV. IEEE J. Sel. Atas. Appl. Earth Obs.
Sens Jauh 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, Harga, KP, Sharda, A., 2020. Drone dalam
pertanian. Adv. Agron. 162, 1–30.
Velusamy, P., Rajendran, S., Mahendran, RK, Naseer, S., Shafiq, M., Choi, J.-G., 2022.
Kenderaan Udara Tanpa Pemandu (UAV) dalam pertanian ketepatan: aplikasi dan cabaran. Tenaga 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. Pemetaan dan klasifikasi habitat marin sensitif ekologi menggunakan Udara Tanpa Pemandu
Imejan Kenderaan (UAV) dan Analisis Imej Berasaskan Objek (OBIA). Penderiaan Jauh 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. Indeks kawasan hijau daripada sistem udara tanpa pemandu berbanding tanaman gandum dan sesawi . Persekitaran Sens Jauh. 152, 654–664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. Menggunakan empat penderia berasaskan UAV optik di atas padang rumput: cabaran dan
batasan. Biogeosains 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. Internet perkara bawah tanah dalam pertanian ketepatan: aspek seni bina dan teknologi. Rangkaian Ad Hoc. 81,
160–173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. Kecerdasan buatan yang bertanggungjawab sebagai ramuan rahsia untuk kesihatan digital: analisis bibliometrik, cerapan dan arahan penyelidikan.
info. Syst. Depan. 1–16.
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. Analisis bibliometrik trend penyelidikan penderiaan jauh dalam pemantauan pertumbuhan tanaman: Kajian kes di China. Penderiaan Jauh 11 (7). https://doi.org/10.3390/rs11070809.
White, HD, Griffith, BC, 1981. Sikap pengarang: Satu ukuran kesusasteraan struktur intelektual. J. Am. Soc. info. Sci. 32 (3), 163–171.
Xiang, H., Tian, L., 2011. Pembangunan sistem penderiaan jauh pertanian kos rendah berdasarkan kenderaan udara tanpa pemandu (UAV) autonomi. Biosis. En. 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. Kajian tentang ciri fenotaip pemprosesan tinggi tumbuhan menggunakan penderia berasaskan UAV. Pengiraan. Elektron. Agric. 178, 105731 https://doi.org/10.1016/j.
kompag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. Kenderaan udara tanpa pemandu untuk aplikasi penderiaan jauh—semakan. Penderiaan Jauh 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021. Memindahkan penjejakan orang dan mengalih keluar trek palsu dengan pengimejan terma inframerah oleh multirotor. Drone 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. Perbandingan anggaran parameter tanaman menggunakan imej daripada UAV-mounted
penderia hiperspektral syot kilat dan kamera digital definisi tinggi. Penderiaan Jauh 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. Anggaran gandum musim sejuk di atas tanah biojisim menggunakan kenderaan udara tanpa pemandu- petikan berdasarkan
model penderia hiperspektral dan ketinggian tanaman dipertingkatkan. Penderiaan Jauh 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. Menggunakan kenderaan udara tanpa pemandu yang ringan untuk memantau pemulihan hutan tropika. biol.
Pemuliharaan. 186, 287–295. https://doi.org/10.1016/j.biocon.2015.03.031. Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019.
Platform IoT pertanian pintar berdasarkan pengkomputeran tepi dan awan. Biosis. En. 177,
4-17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. Kuantifikasi ketinggian pokok menggunakan imejan resolusi sangat tinggi yang diperoleh daripada udara tanpa pemandu
kenderaan (UAV) dan kaedah pembinaan semula foto 3D automatik. Eur. J. Agron. 55, 89–99. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. Fenotaip berasaskan imej bagi keamatan berbunga dalam tanaman musim sejuk. Penderia 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012. Aplikasi sistem udara kecil tanpa pemandu untuk pertanian ketepatan: kajian semula. tepat. Agric. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. Memetakan tegasan air jagung berdasarkan penderiaan jauh berbilang spektrum UAV. Penderiaan Jauh 11 (6), 605.
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz´ alez-Moreno, P., Ma, H., Ye, H., Sobeih , T., 2019. Pendekatan berasaskan pembelajaran mendalam untuk karat kuning automatik
pengesanan penyakit daripada imej UAV hiperspektral resolusi tinggi. Penderiaan Jauh 11 (13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. Pengesanan dan diskriminasi penyakit dan tekanan serangga tumbuhan teh menggunakan pengimejan hiperspektral digabungkan dengan analisis wavelet. Pengiraan. Elektron. Agric. 193, 106717 https://doi.org/10.1016/j. kompag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Penyesuaian domain musuh berpandukan entropi untuk segmentasi semantik imej udara. IEEE Trans. G
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. Pengesanan fenologi beras melalui analisis siri masa spektrum berasaskan tanah data indeks. Res Tanaman Ladang. 198, 131–139. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018. Reka bentuk sistem pembenihan kebocoran pertanian ketepatan berdasarkan penderia wayarles. Int. J. Dalam Talian Eng. 14 (05), 184.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. Analisis perubahan ketinggian tumbuhan jagung bersimpan menggunakan data UAV-LiDAR. Pertanian 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: Perisian analisis imej jagung menggunakan pembelajaran mendalam untuk fenotaip tumbuhan berkeupayaan tinggi . Kaedah Tumbuhan 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. Meramalkan hasil bijirin dalam padi menggunakan tumbuh-tumbuhan pelbagai temporal
indeks daripada imejan berbilang spektrum dan digital berasaskan UAV. ISPRS J. Photogramm. Sens Jauh 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016. Simulasi teknologi teras sistem pemantauan rumah hijau berdasarkan rangkaian penderia tanpa wayar. Int. J. Dalam Talian Eng. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. Penilaian untuk tekanan air tanaman dengan imejan haba inframerah dalam pertanian ketepatan: ulasan
dan prospek masa depan untuk aplikasi pembelajaran mendalam. Pengiraan. Elektron. Agric. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}